
























KVM Series Radiation-Resistant Stepper Motors | Applications in Nuclear Waste Processing
Vacuum · Cryogenic · High-temperature · Radiation
Options
● Safe brake
● Resolver feedback
● Screw output shaft
● Handwheel
● Rear shaft
Ordering Information

KVM series stepper motors
20/28/35/42/57/60/86mm
30/32/38/42/48/51/53/60/70/84/86/128mm
D = single shaft
SZ = double shaft
Blank = without brake
B = with brake
Blank = without feedback
**R = with resolver feedback
| Environmental temperature rating code | Temperature range (℃) |
Vacuum class |
Radiation resistance (Gy,optional) |
| RHT | -20~+200 | 10-3 | 106 |
| SHT | -20~+200 | 10-3/10-5/10-7 | - |
| HT | -20~+150 | 10-3/10-5/10-7 | - |
| NTL1 | -40~+85 | 10-1 | - |
| NTL2 | -60~+120 | 10-3/10-5 | - |
| NTL3 | -65~+125 | 10-3 | - |
| NTL4 | -80~+40 | 10-3 | - |
| NTL5 | -60~+150 | - | - |
| LT | -100~+40 | 10-3 | - |
| SLT | -196~+40 (Non-condensing) |
10-3/10-5/10-7 | - |
| L*H* | customized | customized | customized |
Blank = Non-vacuum
V3 = Low pressure or vacuum to 10-3Pa
V5 = Vacuum to 10-5Pa
V7 = Vacuum to 10-7Pa
Blank = No radiation resistance
RH = Radiation resistance (total dose 106Gy)
*It is not possible to install both brake and position feedback devices on one single motor.
**Kingsni can provide signal converter to convert resolver signals to RS485 output or A/B incremental pulse output.
Description
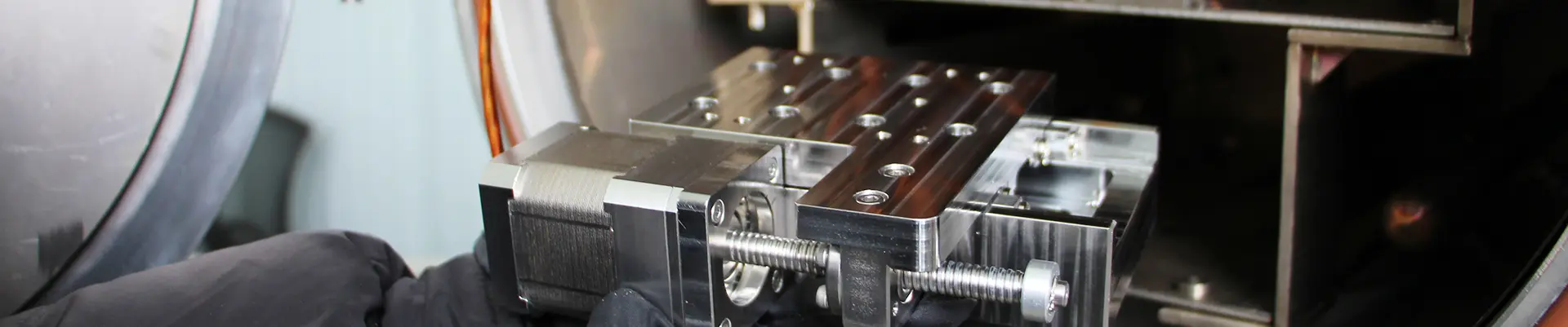
Nuclear waste processing equipment operates under harsh conditions characterized by high radiation levels, high vacuum, and alternating high and low temperatures. As a result, the requirements for radiation resistance, sealing, and reliability of the drive motors far exceed those of ordinary industrial applications. Conventional motors are prone to issues such as radiation-induced aging, structural corrosion, and power failure. The KVM Series radiation-resistant stepper motors are custom-designed for nuclear waste processing. With core advantages including strong radiation resistance, high sealing integrity, and a clean, non-leaching design, these radiation-resistant stepper motors have become the core drive components for nuclear waste processing equipment. These radiation-resistant clean-room stepper motors are compatible with ultra-high vacuum environments of 10⁻⁷ Pa. They utilize high-vacuum grease or solid lubrication solutions, ensuring no release of volatile impurities and preventing contamination of the waste treatment environment and equipment. The radiation-resistant design effectively withstands high-energy radiation damage, and the motors’ cleanliness characteristics fully comply with nuclear industry operational standards.
These motors possess exceptional radiation resistance; their core components undergo special anti-radiation modification, enabling them to withstand high-energy radiation doses of up to 1×10⁶ Gy over extended periods. This effectively protects the motor coils and circuitry from radiation damage, ensuring long-term stable operation. Additionally, these motors are designed for a wide temperature range of -196°C to +200°C, enabling them to withstand temperature fluctuations during waste processing without experiencing performance degradation or structural damage due to alternating high and low temperatures. The radiation-hardened clean stepper motor is equipped with flanges in multiple sizes (28/42/57/86 mm) and offers a torque range of 0.04–6 Nm, meeting the drive requirements for various loads such as waste transfer, valve control, and detection equipment. The irradiation-clean stepper motor delivers stable torque output, ensuring smooth operation during the waste treatment process, while its multi-size design enhances compatibility with nuclear industry equipment.
Nuclear waste processing demands extremely high standards for equipment cleanliness and safety. The irradiation-clean stepper motor features a fully sealed design that effectively prevents radioactive dust from entering the motor interior while also preventing impurities generated by wear on internal components, thereby ensuring a clean operating environment. To meet the automation needs of the nuclear industry, radiation-resistant clean stepper motors support functional options such as dual-axis control, position feedback, and safety braking, enabling precise positioning and safe start/stop operations to enhance operational safety and efficiency. These motors deliver stable power output in applications such as waste transfer robotic arms, vacuum-sealed valves, and radioactive detection equipment; in high-radiation work areas, they maintain low failure rates and long service life. With their superior radiation resistance and cleanliness characteristics, radiation-resistant clean stepper motors provide safe, stable, and reliable power support for nuclear waste processing. They also contribute to the safe and efficient development of the nuclear industry, making them the preferred choice for drive equipment in the sector.
KVM series stepper motors
28/42/57/86mm
32/51/48/60/70/86/128mm
D = single shaft
SZ = double shaft
Blank = without brake
B = with brake
Blank = without feedback
**R = with resolver feedback
| Environmental temperature rating code | Temperature range (℃) |
Vacuum class |
Radiation resistance (Gy,optional) |
| RHT | -20~+200 | 10-3 | 106 |
| SHT | -20~+200 | 10-3/10-5/10-7 | - |
| HT | -20~+150 | 10-3/10-5/10-7 | - |
| NTL1 | -40~+85 | 10-1 | - |
| NTL2 | -60~+120 | 10-3/10-5 | - |
| NTL3 | -65~+125 | 10-3 | - |
| NTL4 | -80~+40 | 10-3 | - |
| NTL5 | -60~+150 | - | - |
| LT | -100~+40 | 10-3 | - |
| SLT | -196~+40 (Non-condensing) |
10-3/10-5/10-7 | - |
| L*H* | customized | customized | customized |
Blank = Non-vacuum
V3 = Low pressure or vacuum to 10-3Pa
V5 = Vacuum to 10-5Pa
V7 = Vacuum to 10-7Pa
Blank = No radiation resistance
RH = Radiation resistance (total dose 106Gy)
*It is not possible to install both brake and position feedback devices on one single motor.
**Kingsni can provide signal converter to convert resolver signals to RS485 output or A/B incremental pulse output.
Technical Specifications
| model number | motor length (mm) |
current (RMS,A) |
resistance (Ω) |
inductance (mH) |
holding torque (N.m) |
rotor inertia (g.cm²) |
mass (Kg) |
motor wiring |
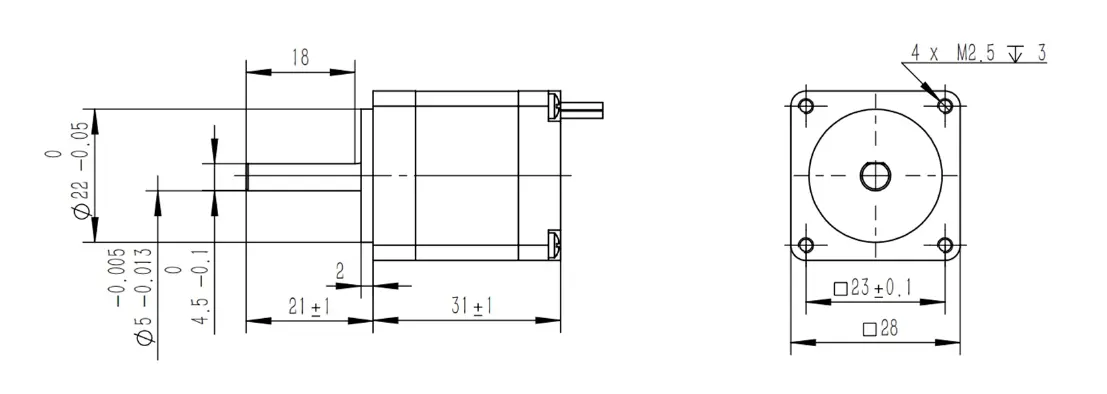
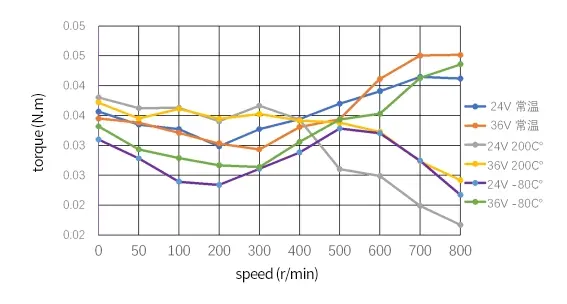
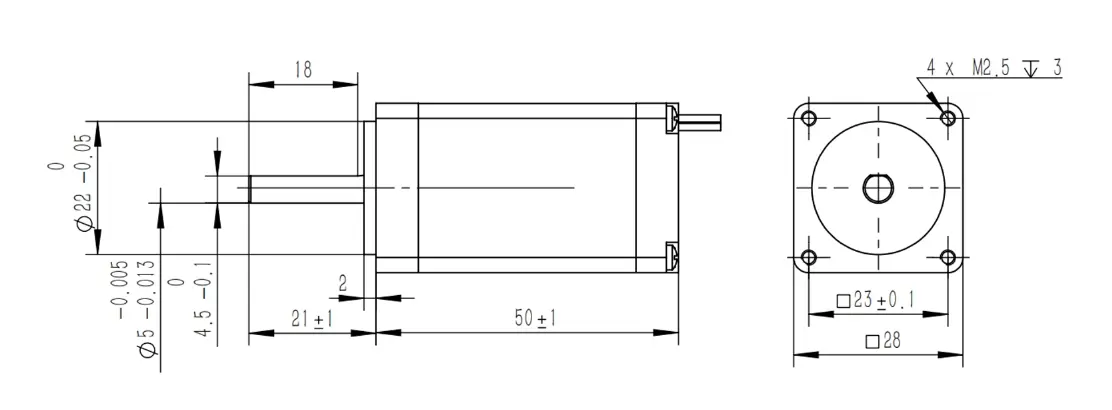
| KVM2832 | 32 | 0.4 | 4.6 | 3.41 | 0.04 | 8 | 0.15 | 4 flying leads |
Dimension Drawings
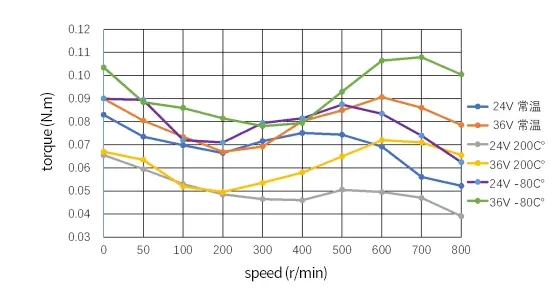
Torque-speed curve
Specifications
| model number | motor length (mm) |
current (RMS,A) |
resistance (Ω) |
inductance (mH) |
holding torque (N.m) |
rotor inertia (g.cm²) |
mass (Kg) |
motor wiring |
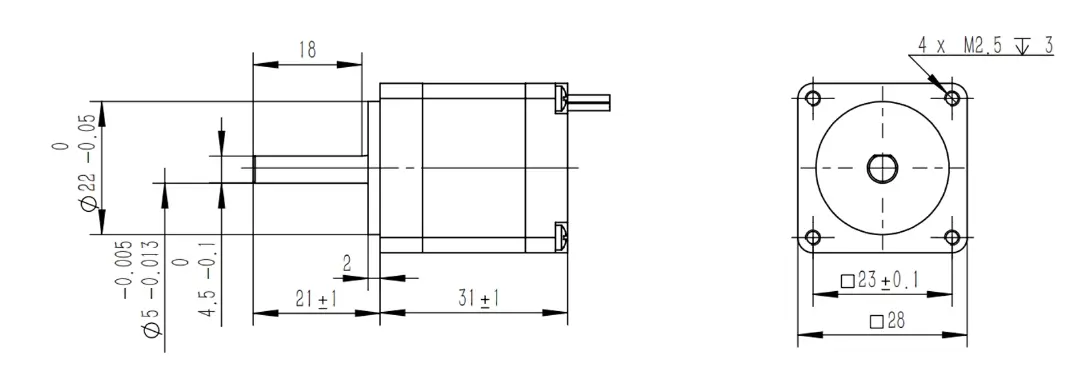
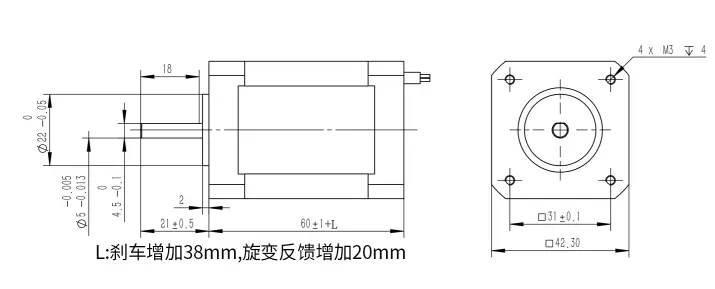
| KVM2851 | 51 | 0.5 | 7.49 | 7.62 | 0.10 | 19 | 0.24 | 4 flying leads |
Dimension Drawings
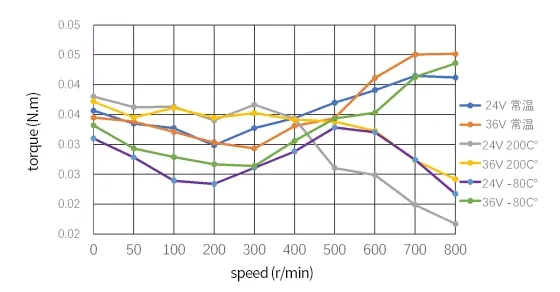
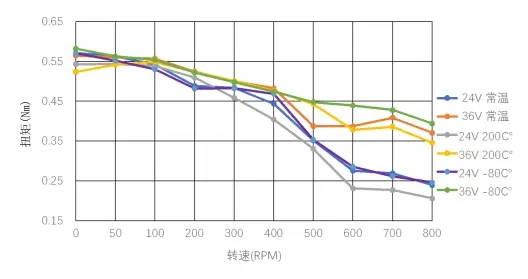
Torque-speed curve
Specifications
| model number | motor length (mm) |
current (RMS,A) |
resistance (Ω) |
inductance (mH) |
holding torque (N.m) |
rotor inertia (g.cm²) |
mass (Kg) |
cable diameter (mm) |
| KVM4248 | 48 | 1.1 | 1.84 | 3.05 | 0.40 | 76 | 0.51 | 4.5 |
Dimension Drawings
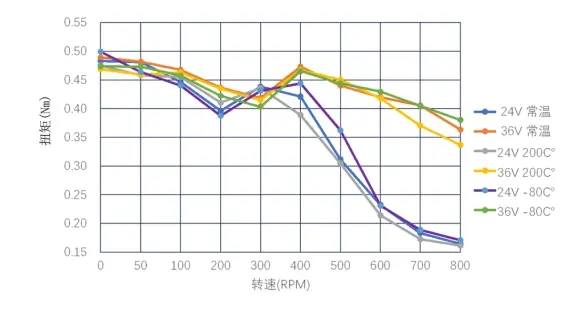
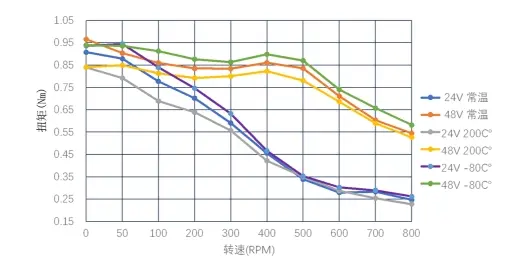
Torque-speed curve
Specifications
| model number | motor length (mm) |
current (RMS,A) |
resistance (Ω) |
inductance (mH) |
holding torque (N.m) |
rotor inertia (g.cm²) |
mass (Kg) |
cable diameter (mm) |
| KVM4260 non-vacuum environments | 60 | 1.4 | 2.31 | 4.45 | 0.58 | 108 | 0.63 | 4.5 |
| KVM4260 vacuum environments | 60 | 1.1 | 2.31 | 4.45 | 0.5 | 108 | 0.63 | 4.5 |
Dimension Drawings
Please contact us for dimension drawings of rear shaft, screw output shaft and handwheel options.
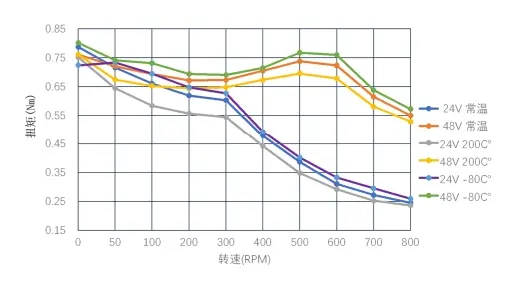
Torque-speed curve
Specifications
| model number | motor length (mm) |
current (RMS,A) |
resistance (Ω) |
inductance (mH) |
holding torque (N.m) |
rotor inertia (g.cm²) |
mass (Kg) |
cable diameter (mm) |
| KVM5770 non-vacuum environments | 70 | 2.7 | 1.15 | 3.32 | 0.97 | 180 | 1.05 | 4.5 |
| KVM5770 vacuum environments | 70 | 1.9 | 1.15 | 3.32 | 0.8 | 180 | 1.05 | 4.5 |
Dimension Drawings

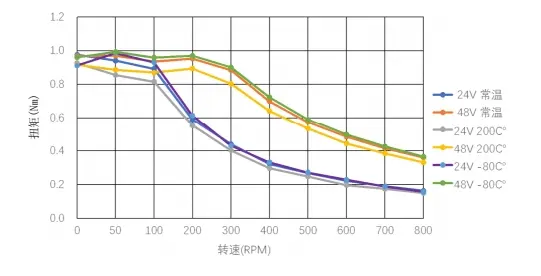
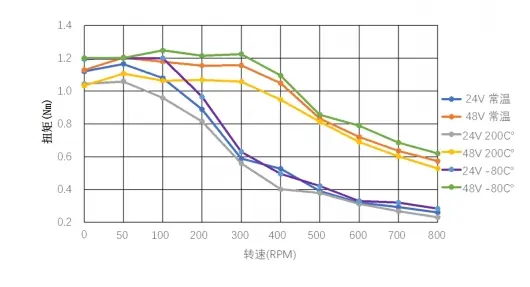
Torque-speed curve
Specifications
| model number | motor length (mm) |
current (RMS,A) |
resistance (Ω) |
inductance (mH) |
holding torque (N.m) |
rotor inertia (g.cm²) |
mass (Kg) |
cable diameter (mm) |
| KVM5786 non-vacuum environments | 86 | 2.7 | 1.43 | 4.05 | 1.2 | 228 | 1.28 | 4.5 |
| KVM5786 vacuum environments | 86 | 1.9 | 1.43 | 4.05 | 0.96 | 228 | 1.28 | 4.5 |
Dimension Drawings
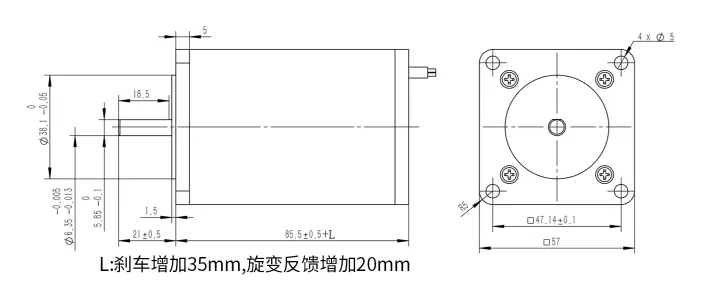
Please contact us for dimension drawings of rear shaft, screw output shaft and handwheel options.
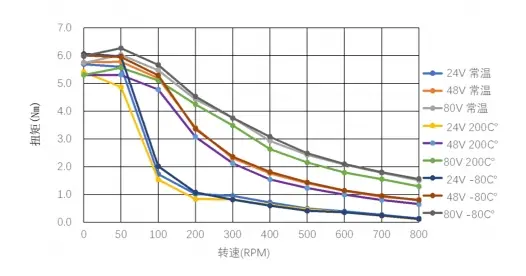
Torque-speed curve
Specifications
| model number | motor length (mm) |
current (RMS,A) |
resistance (Ω) |
inductance (mH) |
holding torque (N.m) |
rotor inertia (g.cm²) |
mass (Kg) |
cable diameter (mm) |
| KVM86128 non-vacuum environments | 128 | 6.0 | 0.99 | 5.18 | 6 | 2700 | 4.7 | 5.0 |
| KVM86128 vacuum environments | 128 | 4.28 | 0.73 | 2.97 | 4.4 | 2700 | 4.7 | 5.0 |
Dimension Drawings
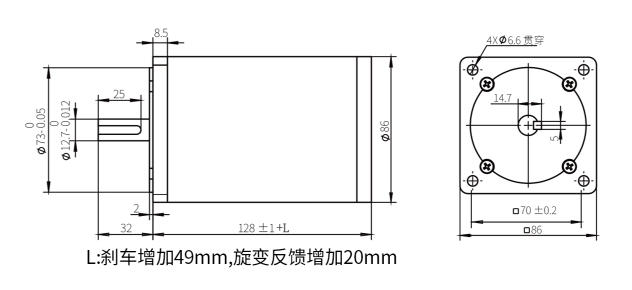
Please contact us for dimension drawings of rear shaft, screw output shaft and handwheel options.
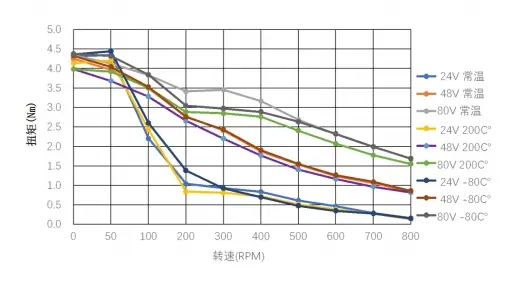
Torque-speed curve