
























KVM Series Vacuum Stepper Motors | Designed for Vacuum Coating Equipment
Vacuum · Cryogenic · High-temperature · Radiation
Options
● Safe brake
● Resolver feedback
● Screw output shaft
● Handwheel
● Rear shaft
Ordering Information

KVM series stepper motors
20/28/35/42/57/60/86mm
30/32/38/42/48/51/53/60/70/84/86/128mm
D = single shaft
SZ = double shaft
Blank = without brake
B = with brake
Blank = without feedback
**R = with resolver feedback
| Environmental temperature rating code | Temperature range (℃) |
Vacuum class |
Radiation resistance (Gy,optional) |
| RHT | -20~+200 | 10-3 | 106 |
| SHT | -20~+200 | 10-3/10-5/10-7 | - |
| HT | -20~+150 | 10-3/10-5/10-7 | - |
| NTL1 | -40~+85 | 10-1 | - |
| NTL2 | -60~+120 | 10-3/10-5 | - |
| NTL3 | -65~+125 | 10-3 | - |
| NTL4 | -80~+40 | 10-3 | - |
| NTL5 | -60~+150 | - | - |
| LT | -100~+40 | 10-3 | - |
| SLT | -196~+40 (Non-condensing) |
10-3/10-5/10-7 | - |
| L*H* | customized | customized | customized |
Blank = Non-vacuum
V3 = Low pressure or vacuum to 10-3Pa
V5 = Vacuum to 10-5Pa
V7 = Vacuum to 10-7Pa
Blank = No radiation resistance
RH = Radiation resistance (total dose 106Gy)
*It is not possible to install both brake and position feedback devices on one single motor.
**Kingsni can provide signal converter to convert resolver signals to RS485 output or A/B incremental pulse output.
Description
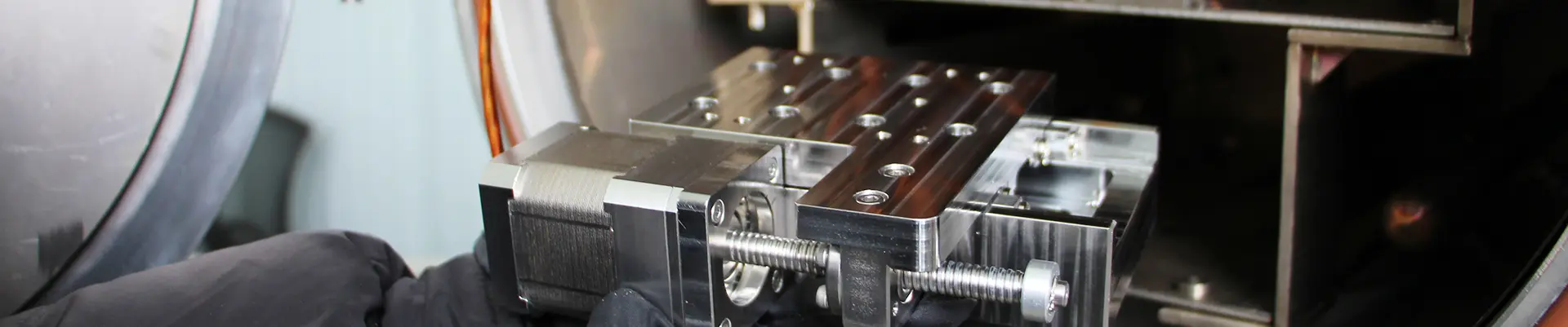
The core operational stages of vacuum coating equipment require the sustained maintenance of an ultra-high vacuum environment. As the coating process involves temperature fluctuations and trace levels of process radiation, it imposes extremely stringent requirements on the sealing, cleanliness, and positioning accuracy of the drive motors. The KVM Series vacuum stepper motors are precisely tailored to the needs of the coating industry. With their low outgassing, high sealing performance, and temperature stability, they are widely used in various production lines, including optical coating, metal coating, and roll-to-roll coating. These vacuum stepper motors have become the core drive components of coating equipment. Vacuum stepper motors meet ultra-high vacuum standards of 10⁻⁷ Pa. They utilize specialized high-vacuum grease that does not release volatile impurities, thereby preventing film contamination and ensuring the purity and quality of the final coating products. The high-seal design of vacuum stepper motors effectively prevents external gases from entering the chamber, further enhancing the cleanliness of the coating environment. Their low outgassing characteristics also make them a top choice in the coating industry.
Coating processes involve a wide temperature range. Vacuum stepper motors can operate stably within a broad temperature range of -196°C to +200°C, withstanding the alternating challenges of high-temperature baking and low-temperature cooling within the chamber without experiencing stuttering, loss of synchronization, or performance degradation due to sudden temperature changes. In the low-level radiation environments encountered during coating processes, the internal components of vacuum stepper motors possess excellent radiation resistance, enabling them to withstand long-term radiation exposure and effectively extending the service life of the equipment. Vacuum stepper motors are available in multiple flange sizes—28, 42, 57, and 86 mm—with torque ranges spanning 0.04 to 6 Nm. They can be precisely matched to various load stations, such as target drive, substrate stage transmission, and vacuum chamber door operation, meeting the drive requirements of all types of coating equipment. The stable torque output of vacuum stepper motors ensures smooth movement of workpieces during the coating process, enhancing coating uniformity. The multi-specification design of these motors also improves equipment adaptability.
To meet the automation needs of coating production lines, vacuum stepper motors support functional options such as ball screw shafts and position feedback, enabling micron-level precise positioning to ensure consistent and uniform coating thickness. In continuous web coating equipment, vacuum stepper motors precisely regulate material feed tension; in optical lens coating equipment, they drive workpieces to rotate at a constant speed and align accurately; in metal coating equipment, they control the oscillation amplitude of the target material to improve coating uniformity. Stable operational performance and high adaptability make vacuum stepper motors suitable for all types of vacuum coating equipment. With their clean, non-leaching properties and resistance to high temperatures and radiation, they optimize coating production processes and reduce defect rates. The high reliability of vacuum stepper motors minimizes production line downtime and boosts production efficiency, making them the core power solution for high-precision mass production in the vacuum coating industry.
KVM series stepper motors
28/42/57/86mm
32/51/48/60/70/86/128mm
D = single shaft
SZ = double shaft
Blank = without brake
B = with brake
Blank = without feedback
**R = with resolver feedback
| Environmental temperature rating code | Temperature range (℃) |
Vacuum class |
Radiation resistance (Gy,optional) |
| RHT | -20~+200 | 10-3 | 106 |
| SHT | -20~+200 | 10-3/10-5/10-7 | - |
| HT | -20~+150 | 10-3/10-5/10-7 | - |
| NTL1 | -40~+85 | 10-1 | - |
| NTL2 | -60~+120 | 10-3/10-5 | - |
| NTL3 | -65~+125 | 10-3 | - |
| NTL4 | -80~+40 | 10-3 | - |
| NTL5 | -60~+150 | - | - |
| LT | -100~+40 | 10-3 | - |
| SLT | -196~+40 (Non-condensing) |
10-3/10-5/10-7 | - |
| L*H* | customized | customized | customized |
Blank = Non-vacuum
V3 = Low pressure or vacuum to 10-3Pa
V5 = Vacuum to 10-5Pa
V7 = Vacuum to 10-7Pa
Blank = No radiation resistance
RH = Radiation resistance (total dose 106Gy)
*It is not possible to install both brake and position feedback devices on one single motor.
**Kingsni can provide signal converter to convert resolver signals to RS485 output or A/B incremental pulse output.
Technical Specifications
| model number | motor length (mm) |
current (RMS,A) |
resistance (Ω) |
inductance (mH) |
holding torque (N.m) |
rotor inertia (g.cm²) |
mass (Kg) |
motor wiring |
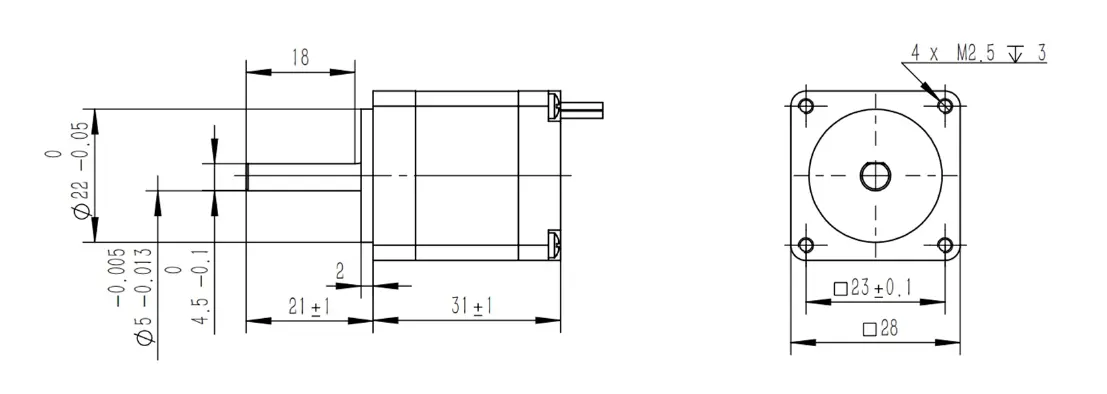
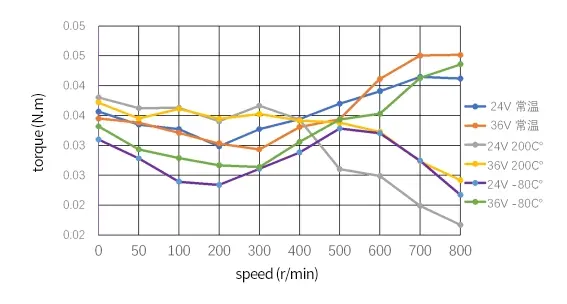
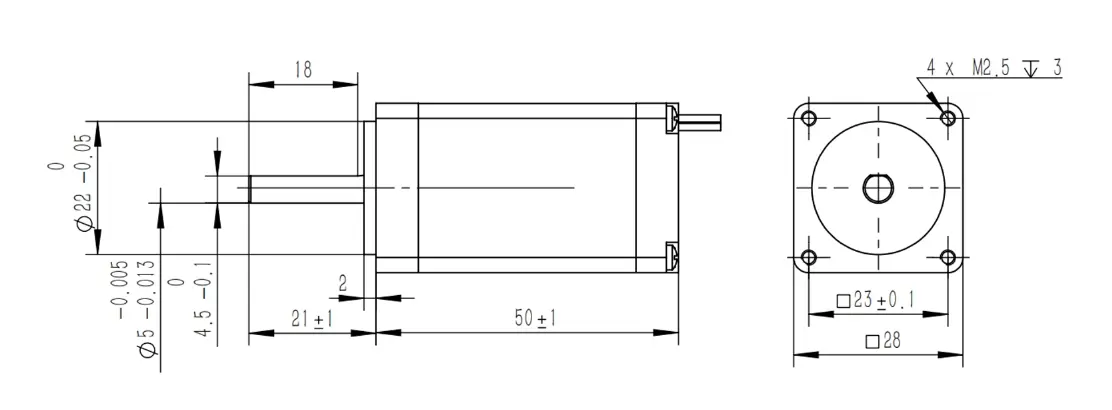
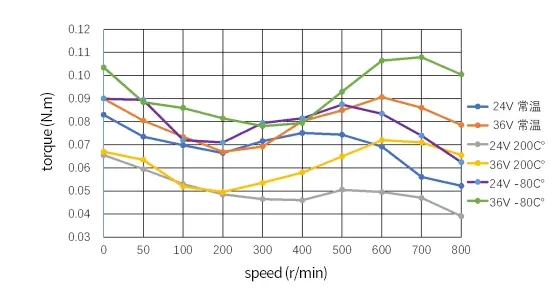
| KVM2832 | 32 | 0.4 | 4.6 | 3.41 | 0.04 | 8 | 0.15 | 4 flying leads |
Dimension Drawings
Torque-speed curve
Specifications
| model number | motor length (mm) |
current (RMS,A) |
resistance (Ω) |
inductance (mH) |
holding torque (N.m) |
rotor inertia (g.cm²) |
mass (Kg) |
motor wiring |
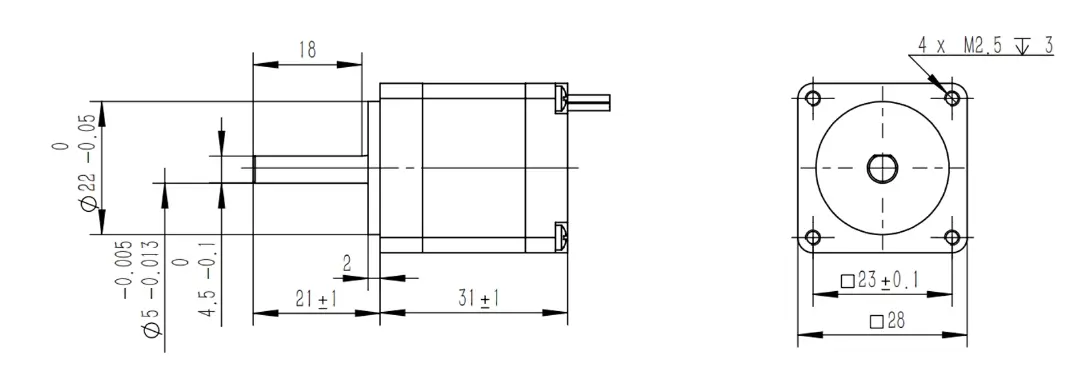
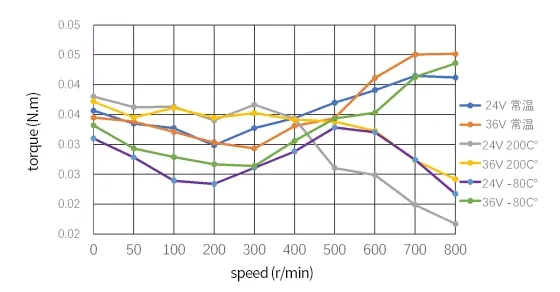
| KVM2851 | 51 | 0.5 | 7.49 | 7.62 | 0.10 | 19 | 0.24 | 4 flying leads |
Dimension Drawings
Torque-speed curve
Specifications
| model number | motor length (mm) |
current (RMS,A) |
resistance (Ω) |
inductance (mH) |
holding torque (N.m) |
rotor inertia (g.cm²) |
mass (Kg) |
cable diameter (mm) |
| KVM4248 | 48 | 1.1 | 1.84 | 3.05 | 0.40 | 76 | 0.51 | 4.5 |
Dimension Drawings
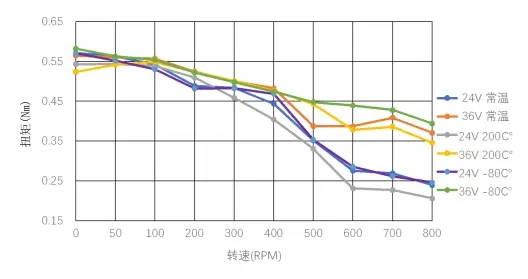
Torque-speed curve
Specifications
| model number | motor length (mm) |
current (RMS,A) |
resistance (Ω) |
inductance (mH) |
holding torque (N.m) |
rotor inertia (g.cm²) |
mass (Kg) |
cable diameter (mm) |
| KVM4260 non-vacuum environments | 60 | 1.4 | 2.31 | 4.45 | 0.58 | 108 | 0.63 | 4.5 |
| KVM4260 vacuum environments | 60 | 1.1 | 2.31 | 4.45 | 0.5 | 108 | 0.63 | 4.5 |
Dimension Drawings
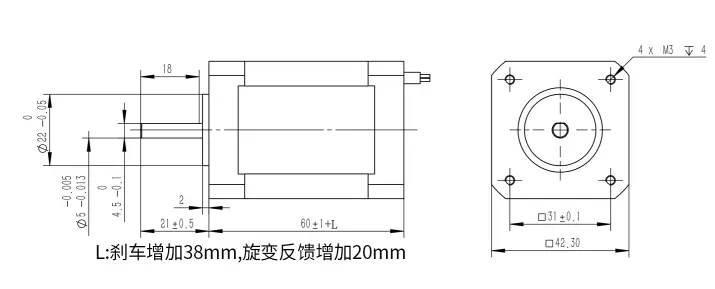
Please contact us for dimension drawings of rear shaft, screw output shaft and handwheel options.
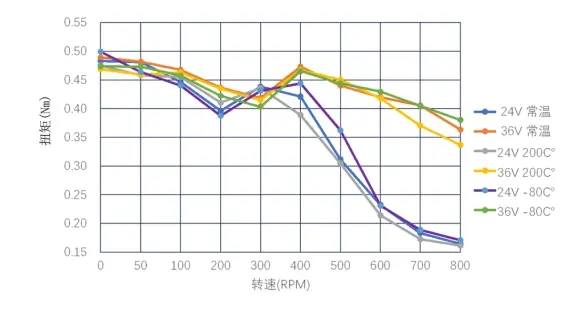
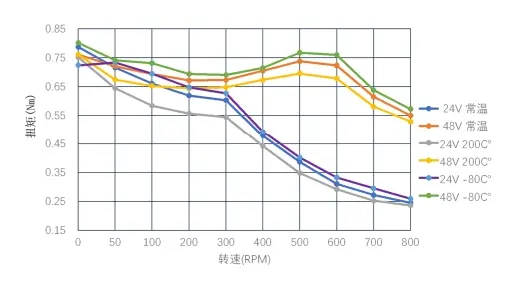
Torque-speed curve
Specifications
| model number | motor length (mm) |
current (RMS,A) |
resistance (Ω) |
inductance (mH) |
holding torque (N.m) |
rotor inertia (g.cm²) |
mass (Kg) |
cable diameter (mm) |
| KVM5770 non-vacuum environments | 70 | 2.7 | 1.15 | 3.32 | 0.97 | 180 | 1.05 | 4.5 |
| KVM5770 vacuum environments | 70 | 1.9 | 1.15 | 3.32 | 0.8 | 180 | 1.05 | 4.5 |
Dimension Drawings

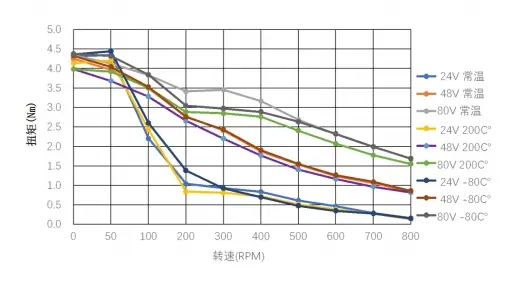
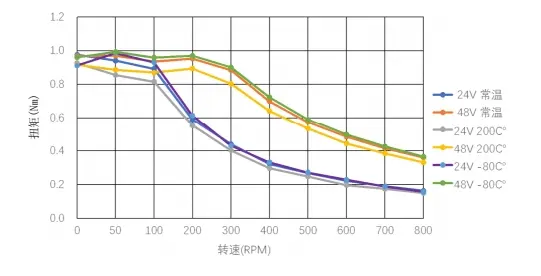
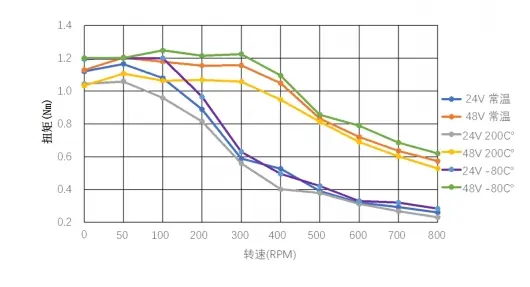
Torque-speed curve
Specifications
| model number | motor length (mm) |
current (RMS,A) |
resistance (Ω) |
inductance (mH) |
holding torque (N.m) |
rotor inertia (g.cm²) |
mass (Kg) |
cable diameter (mm) |
| KVM5786 non-vacuum environments | 86 | 2.7 | 1.43 | 4.05 | 1.2 | 228 | 1.28 | 4.5 |
| KVM5786 vacuum environments | 86 | 1.9 | 1.43 | 4.05 | 0.96 | 228 | 1.28 | 4.5 |
Dimension Drawings
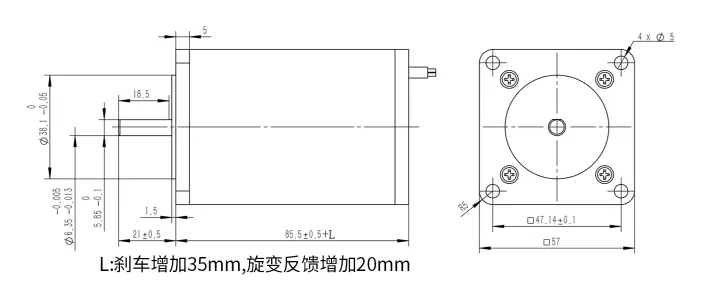
Please contact us for dimension drawings of rear shaft, screw output shaft and handwheel options.
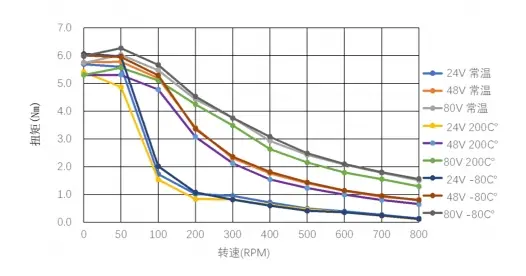
Torque-speed curve
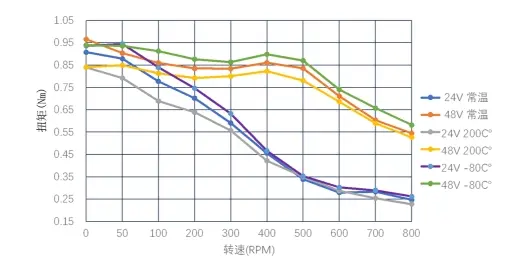
Specifications
| model number | motor length (mm) |
current (RMS,A) |
resistance (Ω) |
inductance (mH) |
holding torque (N.m) |
rotor inertia (g.cm²) |
mass (Kg) |
cable diameter (mm) |
| KVM86128 non-vacuum environments | 128 | 6.0 | 0.99 | 5.18 | 6 | 2700 | 4.7 | 5.0 |
| KVM86128 vacuum environments | 128 | 4.28 | 0.73 | 2.97 | 4.4 | 2700 | 4.7 | 5.0 |
Dimension Drawings
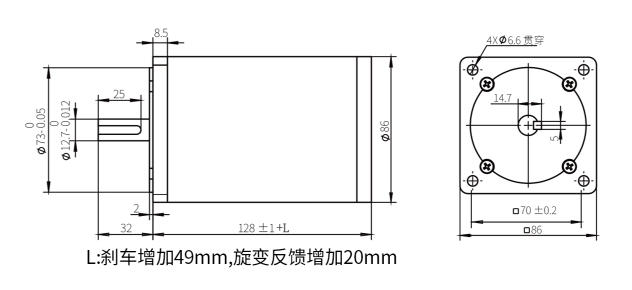
Please contact us for dimension drawings of rear shaft, screw output shaft and handwheel options.
Torque-speed curve