




















KH Series High-Low Temperature Stepper Motors | Applications in Automotive Wiring Harness Durability Testing
Vacuum · Cryogenic · High-temperature · Radiation
Options
● Encoder feedback
● Integrated stepper drives
● Rear shaft
Ordering Information

KH series stepper motors
28/42/57/86mm
48/51/56/58/60/65/76/80/84/118/156/165/201mm
D = single shaft
SZ = double shaft
Blank = without brake
B = with brake
Blank = without feedback
**IE = Incremental encoder
*** AE = Absolute encoder(RS485, Modbus RTU)
Blank = Without integrated mounted stepper drive
DRC = stepper driver mounted on the side of the motor
DRH = stepper driver mounted at the rear end of the motor
*It is not possible to install both brake and position feedback devices on one single motor.
**In order for the incremental encoder signal to be received and processed by the closed-loop stepper drive, the encoder output signals must be 5V differential signals with a maximum resolution of 2500PPR.
*** The absolute encoder feedback signals need to be received and processed by the user′s controller.
Description
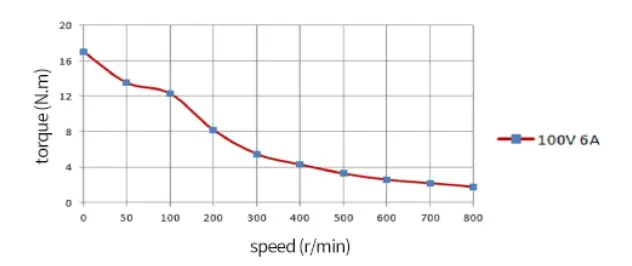
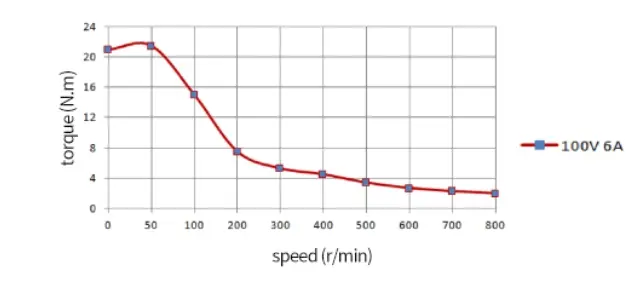
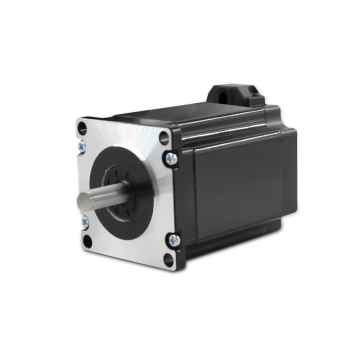
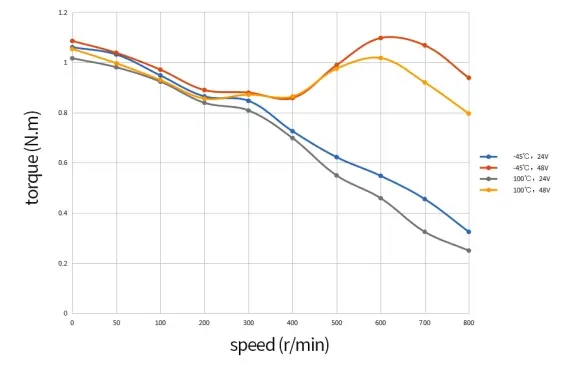
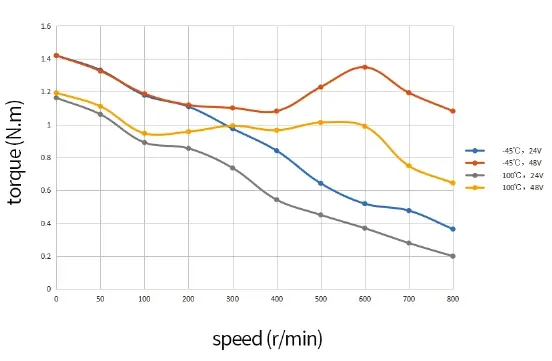
In the extreme operating conditions of automotive wiring harness durability testing, the ambient temperature range is extremely wide, ranging from as low as -45°C to as high as +100°C, which poses a severe challenge to the temperature resistance of drive components. As the core power unit of this testing system, high-temperature and low-temperature stepper motors ensure the authenticity and reliability of test data thanks to their exceptional wide-temperature-range adaptability. The KH Series high-temperature and low-temperature stepper motors are specifically designed for environments ranging from -45°C to +100°C. They incorporate special low-temperature grease and high-temperature heat-resistant magnets, eliminating the risks of traditional motors seizing up in extreme cold or demagnetizing in high temperatures. In automotive wiring harness endurance testing, high-temperature and low-temperature stepper motors must repeatedly simulate actions such as harness insertion, removal, and bending. With six flange sizes ranging from 28 mm to 110 mm, they can accommodate wiring harness fixtures with varying loads. Maintaining a torque range of 0.12 to 21 Nm, these motors are capable of driving both micro-sized wiring harness connectors and heavy-duty wiring harness assemblies. Notably, these motors can still deliver over 90% of their rated torque during cold starts at -45°C, a critical feature for automotive cold-weather durability testing. To address potential power-off braking requirements during testing, the motors can be equipped with an optional safety brake to prevent accidental damage to the wiring harness. Additionally, these motors support custom shaft configurations, such as extended shafts or dual-shaft designs, facilitating connection to encoders or load simulators. With an optional integrated driver, the motors support CANopen or Modbus communication, significantly simplifying test bench wiring. During high-temperature wiring harness aging tests at 100°C, the motor windings utilize Class H insulation, ensuring ample thermal margin. In the -45°C low-temperature zone, the rotor bearings of the high-low temperature stepper motors undergo anti-cold-shrink treatment to prevent abnormal clearance. In summary, the KH series high-low temperature stepper motors provide a comprehensive drive solution for automotive wiring harness durability testing—from extreme cold to extreme heat—thanks to their wide temperature range, high torque density, and extensive customization options. The precise replication of every wire harness bend relies on the stable output of high-low temperature stepper motors. Ultimately, test data shows that the mean time between failures (MTBF) on durability test benches equipped with these motors has increased by more than three times. Choosing the KH series high-low temperature stepper motors means choosing a reliable foundation for automotive wire harness quality verification.

KH series stepper motors
28/42/57/86mm
48/51/56/58/60/65/76/80/84/118/156/165/201mm
D = single shaft
SZ = double shaft
Blank = without brake
B = with brake
Blank = without feedback
**IE = Incremental encoder
*** AE = Absolute encoder(RS485, Modbus RTU)
Blank = Without integrated mounted stepper drive
DRC = stepper driver mounted on the side of the motor
DRH = stepper driver mounted at the rear end of the motor
*It is not possible to install both brake and position feedback devices on one single motor.
**In order for the incremental encoder signal to be received and processed by the closed-loop stepper drive, the encoder output signals must be 5V differential signals with a maximum resolution of 2500PPR.
*** The absolute encoder feedback signals need to be received and processed by the user′s controller.
Technical Specifications
| model number | motor length (mm) |
current (RMS,A) |
resistance (Ω) |
inductance (mH) |
holding torque (N.m) |
rotor inertia (g.cm²) |
mass (Kg) |
cable diameter (mm, Including shield) |
IP grade |
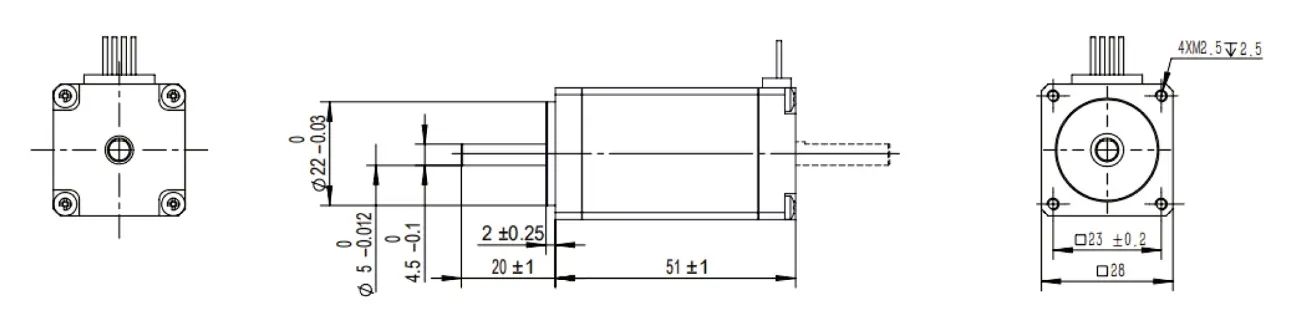
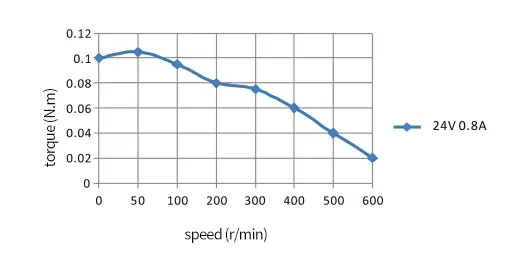
| KH2851 | 51 | 0.8 | 8.55 | 2.10 | 0.1 | 18 | 0.2 | - | IP65 |
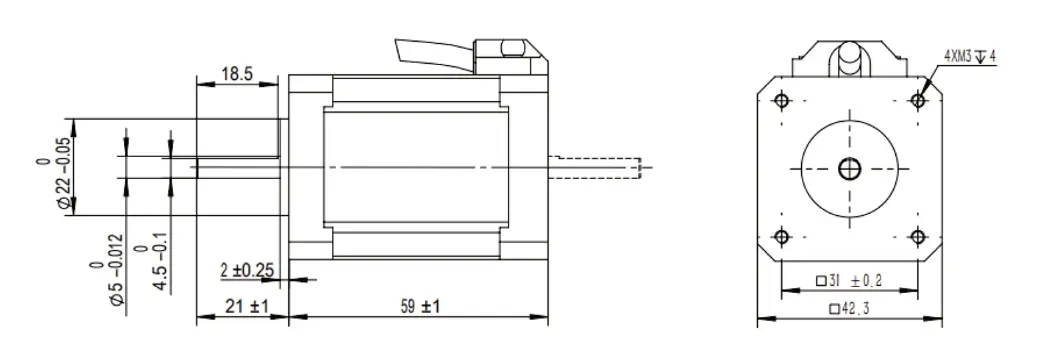
Dimension Drawings
Torque-speed curve
Specifications
| model number | motor length (mm) |
current (RMS,A) |
resistance (Ω) |
inductance (mH) |
holding torque (N.m) |
rotor inertia (g.cm²) |
mass (Kg) |
cable diameter (mm, Including shield) |
IP grade |
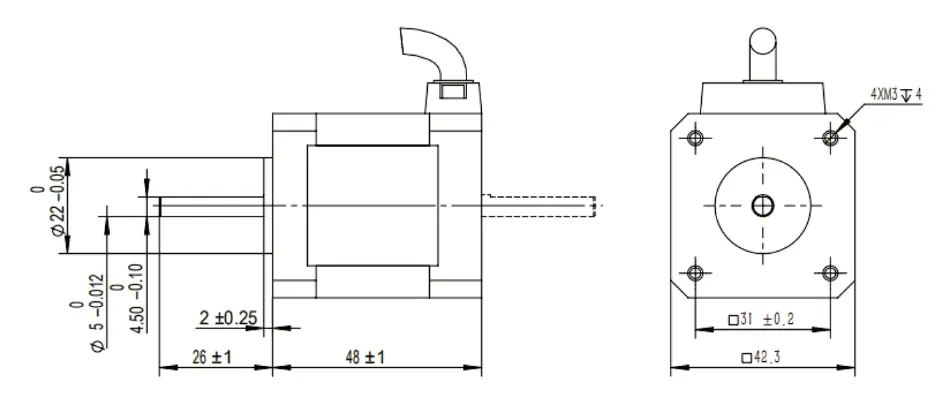
| KH4248 | 48 | 1.3 | 2.05 | 2.65 | 0.35 | 68 | 0.4 | 4.5 | IP65 |
| KH4260 | 60 | 1.3 | 3.15 | 4.65 | 0.5 | 102 | 0.5 | 4.5 | IP65 |
Dimension Drawings
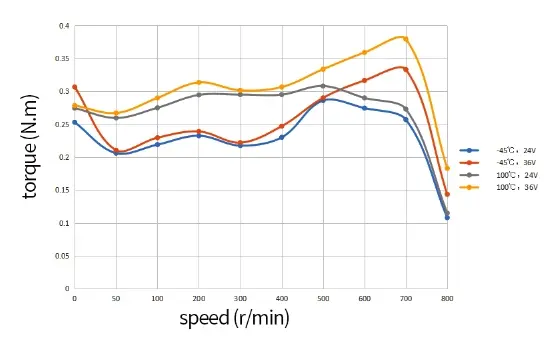
Torque-speed curve
Specifications
| model number | motor length (mm) |
current (RMS,A) |
resistance (Ω) |
inductance (mH) |
holding torque (N.m) |
rotor inertia (g.cm²) |
mass (Kg) |
cable diameter (mm, Including shield) |
IP grade |
| KH5756 | 56 | 3.0 | 0.58 | 1.00 | 0.8 | 300 | 0.7 | 5.0 | IP65 |
| KH5776 | 76 | 3.0 | 0.75 | 1.62 | 1.4 | 480 | 1.0 | 5.0 | IP65 |
Dimension Drawings
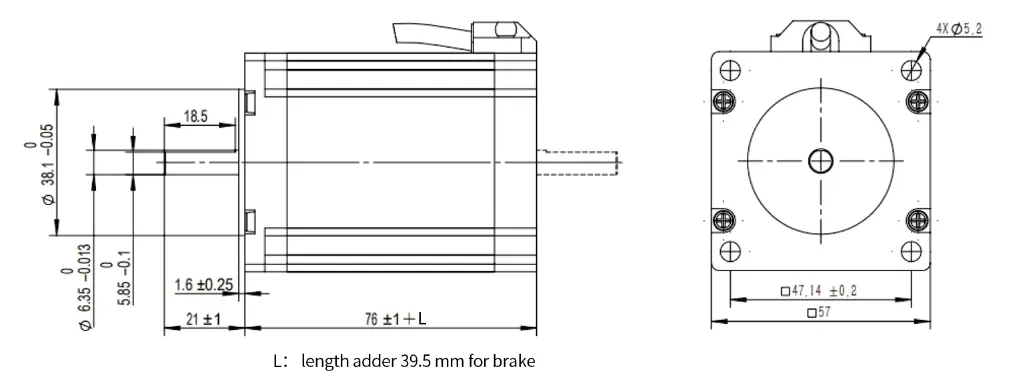
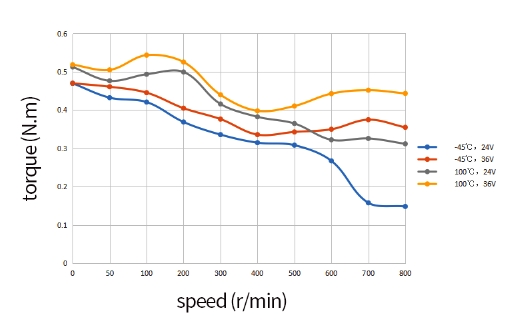
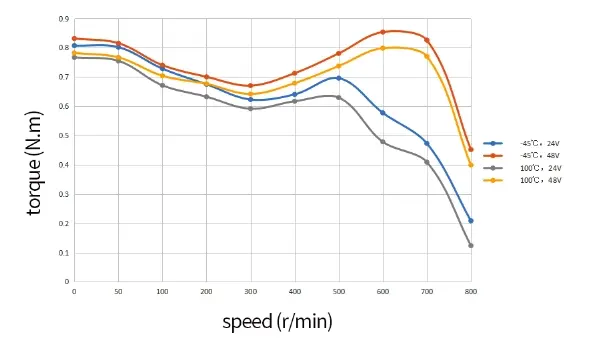
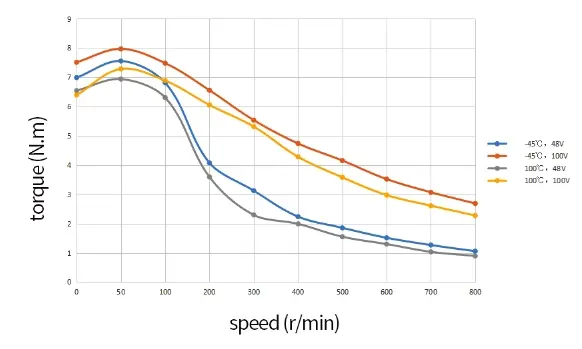
Torque-speed curve
Specifications
| model number | motor length (mm) |
current (RMS,A) |
resistance (Ω) |
inductance (mH) |
holding torque (N.m) |
rotor inertia (g.cm²) |
mass (Kg) |
cable diameter (mm, Including shield) |
IP grade |
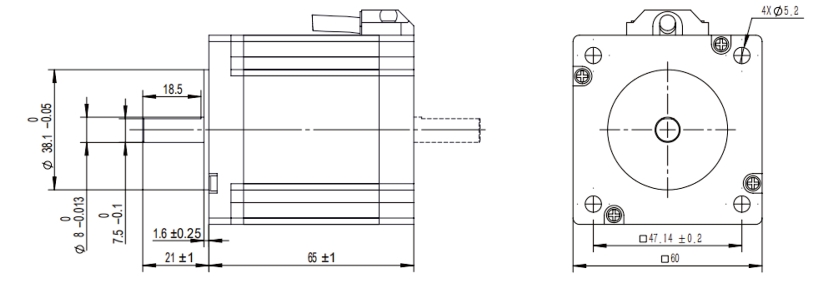
| KH6058 | 58 | 3.0 | 0.76 | 1.66 | 1.1 | 300 | 0.8 | 5.0 | IP65 |
| KH6065 | 65 | 3.0 | 0.87 | 1.97 | 1.40 | 570 | 1.0 | 5.0 | IP65 |
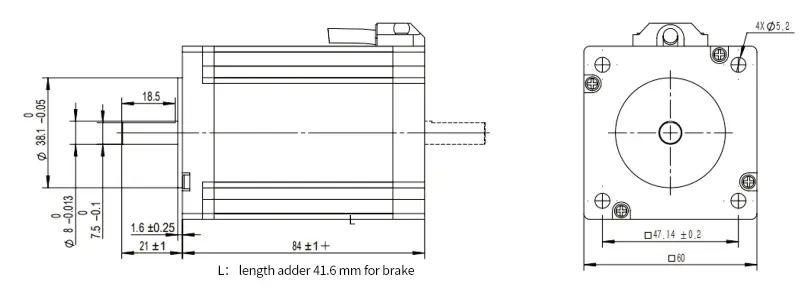
| KH6084 | 84 | 3.5 | 1.15 | 2.85 | 2.2 | 840 | 1.3 | 5.0 | IP65 |
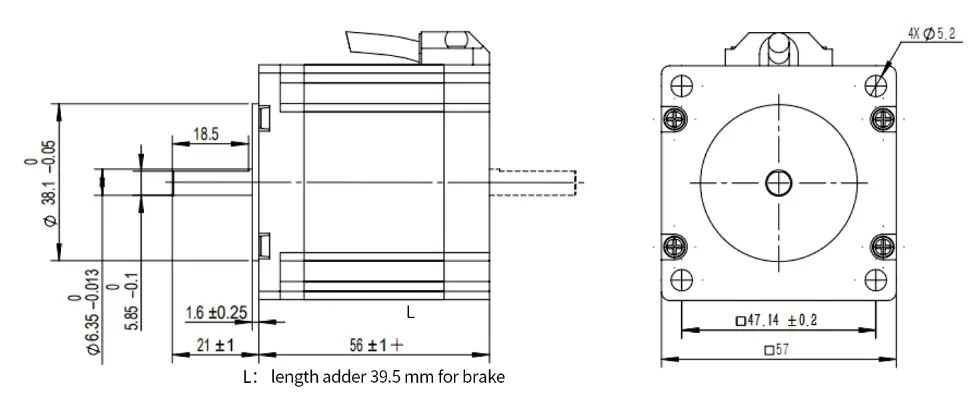
Dimension Drawings
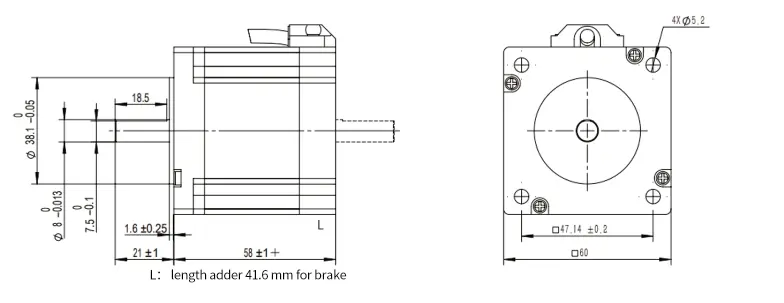
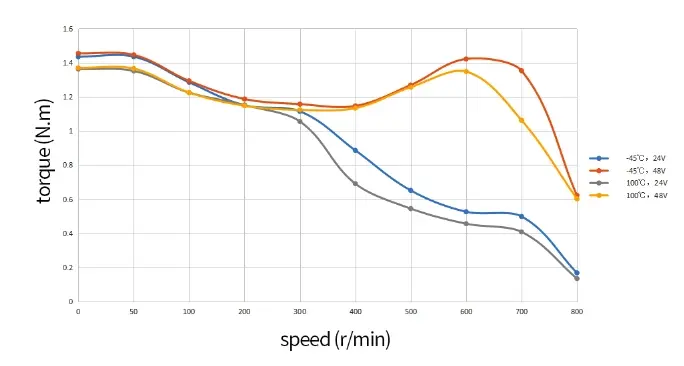
Torque-speed curve
Specifications
| model number | motor length (mm) |
current (RMS,A) |
resistance (Ω) |
inductance (mH) |
holding torque (N.m) |
rotor inertia (g.cm²) |
mass (Kg) |
cable diameter (mm, Including shield) |
IP grade |
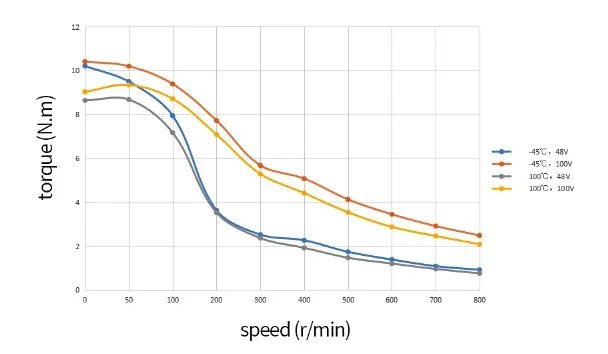
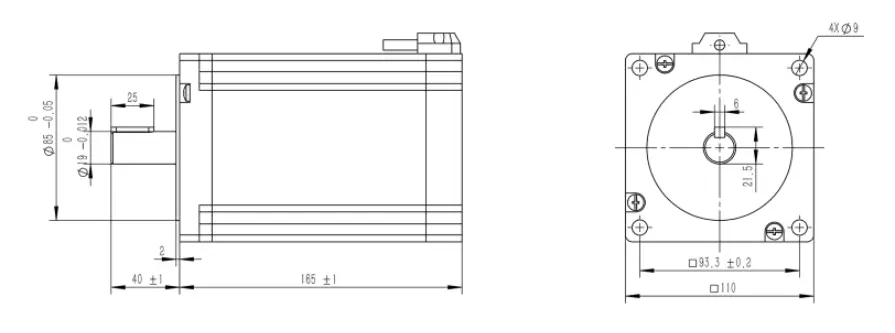
| KH8680 | 80 | 4.4 | 0.46 | 2.56 | 2.8 | 1400 | 2.3 | 6.0 | IP65 |
| KH86118 | 118 | 6.0 | 0.73 | 6.05 | 7.5 | 2700 | 3.9 | 6.0 | IP65 |
| KH86156 | 156 | 6.0 | 0.71 | 8.24 | 10.0 | 4000 | 5.5 | 6.0 | IP65 |
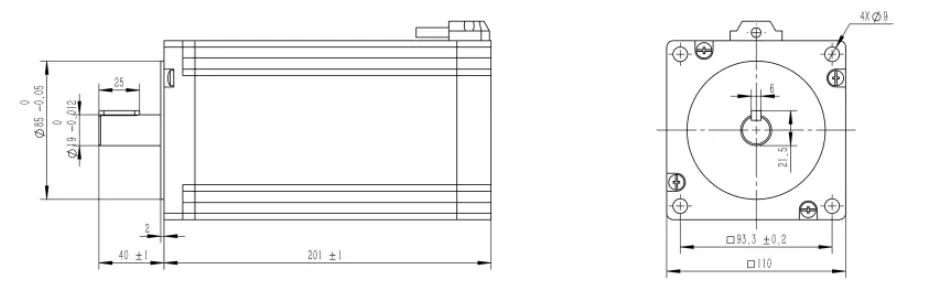
Dimension Drawings
Torque-speed curve
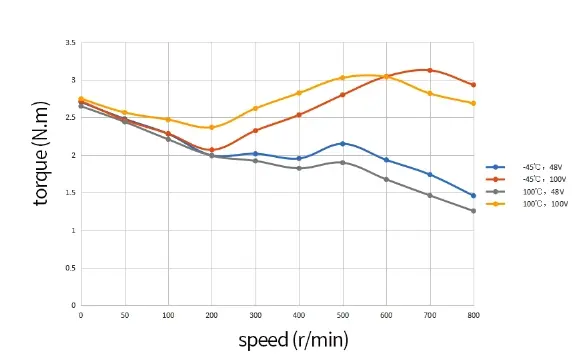
Specifications
| model number | motor length (mm) |
current (RMS,A) |
resistance (Ω) |
inductance (mH) |
holding torque (N.m) |
rotor inertia (g.cm²) |
mass (Kg) |
cable diameter (mm, Including shield) |
IP grade |
| KH110165 | 165 | 6.0 | 0.90 | 20 | 17 | 13000 | 9.6 | 6.0 | IP65 |
| KH110201 | 201 | 6.0 | 1.095 | 23.19 | 21 | 16200 | 11.9 | 6.0 | IP65 |
Dimension Drawings
Torque-speed curve