
























KVM Series High-Temperature Stepper Motors | Designed for Extreme Environments with Vacuum, Wide Temperature Ranges, and Radiation Exposure
Vacuum · Cryogenic · High-temperature · Radiation
Options
● Safe brake
● Resolver feedback
● Screw output shaft
● Handwheel
● Rear shaft
Ordering Information

KVM series stepper motors
20/28/35/42/57/60/86mm
30/32/38/42/48/51/53/60/70/84/86/128mm
D = single shaft
SZ = double shaft
Blank = without brake
B = with brake
Blank = without feedback
**R = with resolver feedback
| Environmental temperature rating code | Temperature range (℃) |
Vacuum class |
Radiation resistance (Gy,optional) |
| RHT | -20~+200 | 10-3 | 106 |
| SHT | -20~+200 | 10-3/10-5/10-7 | - |
| HT | -20~+150 | 10-3/10-5/10-7 | - |
| NTL1 | -40~+85 | 10-1 | - |
| NTL2 | -60~+120 | 10-3/10-5 | - |
| NTL3 | -65~+125 | 10-3 | - |
| NTL4 | -80~+40 | 10-3 | - |
| NTL5 | -60~+150 | - | - |
| LT | -100~+40 | 10-3 | - |
| SLT | -196~+40 (Non-condensing) |
10-3/10-5/10-7 | - |
| L*H* | customized | customized | customized |
Blank = Non-vacuum
V3 = Low pressure or vacuum to 10-3Pa
V5 = Vacuum to 10-5Pa
V7 = Vacuum to 10-7Pa
Blank = No radiation resistance
RH = Radiation resistance (total dose 106Gy)
*It is not possible to install both brake and position feedback devices on one single motor.
**Kingsni can provide signal converter to convert resolver signals to RS485 output or A/B incremental pulse output.
Description
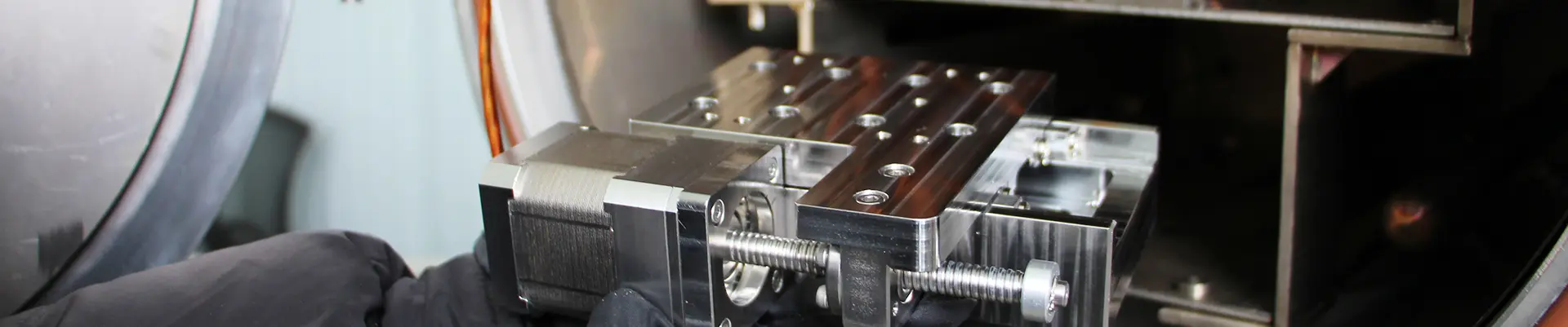
In applications such as aerospace simulation, specialized scientific research, and extreme environment testing, equipment must operate continuously under harsh conditions—including ultra-high vacuum, wide temperature fluctuations, and high-energy radiation. Conventional stepper motors are prone to issues such as temperature-induced drift, loss of synchronization, seal failure, and radiation-induced aging. The KVM Series High-Temperature Stepper Motors are custom-engineered for demanding operating conditions. With core advantages including temperature resistance, radiation resistance, and superior sealing, they are the preferred choice for driving systems in extreme environments, perfectly meeting the demands of all extreme operational scenarios. These high-temperature stepper motors support ultra-high vacuum environments down to 10⁻⁷ Pa. They utilize high-vacuum grease or solid lubrication solutions to eliminate gas outgassing contamination, ensuring the cleanliness of the operating environment. The sealing structure of these motors has been specially optimized to effectively isolate them from harsh external environments, protecting internal components from damage and further enhancing operational stability.
High-temperature stepper motors possess exceptional temperature resistance, operating stably within the extreme temperature range of -196°C to +200°C. They can withstand the rigorous challenges of high-temperature baking while resisting performance degradation in low-temperature environments. The winding structure has been optimized for temperature resistance, maintaining stable torque output throughout the entire operating range. For radiation-exposed applications, the core components of the high-temperature stepper motor have been modified to be radiation-resistant, capable of withstanding an irradiation dose of 1×10⁶ Gy, effectively preventing radiation from affecting motor performance. The high-temperature stepper motor is equipped with flanges in multiple sizes (28/42/57/86 mm), covering a torque range of 0.04–6 Nm, to meet the drive requirements of various loads and accommodate installation and use in all types of extreme-environment equipment. The high-temperature stepper motor’s lubrication system can be flexibly adjusted according to operating conditions, further adapting to extreme temperature ranges and vacuum environments to ensure long-term stable operation.
To accommodate diverse extreme operating conditions, the high-temperature stepper motor supports various functional options, including dual-axis control, safety braking, and temperature sensors. Its integrated design enhances equipment compatibility and meets the personalized needs of different scenarios. In aerospace test chambers, high-temperature stepper motors achieve precise position control; within radiation testing equipment, they maintain continuous and smooth operation; and in high- and low-temperature simulation chambers, they handle temperature fluctuations with ease, demonstrating exceptional environmental adaptability. Rigorous operational testing has verified that these motors resist aging and deformation while maintaining low power loss, significantly reducing equipment maintenance frequency and operational costs. With their superior environmental adaptability and precise drive capabilities, high-temperature stepper motors break through the operational limitations of traditional motors. Their high reliability provides stable, dependable, and efficient power solutions for a wide range of extreme environmental applications.
KVM series stepper motors
28/42/57/86mm
32/51/48/60/70/86/128mm
D = single shaft
SZ = double shaft
Blank = without brake
B = with brake
Blank = without feedback
**R = with resolver feedback
| Environmental temperature rating code | Temperature range (℃) |
Vacuum class |
Radiation resistance (Gy,optional) |
| RHT | -20~+200 | 10-3 | 106 |
| SHT | -20~+200 | 10-3/10-5/10-7 | - |
| HT | -20~+150 | 10-3/10-5/10-7 | - |
| NTL1 | -40~+85 | 10-1 | - |
| NTL2 | -60~+120 | 10-3/10-5 | - |
| NTL3 | -65~+125 | 10-3 | - |
| NTL4 | -80~+40 | 10-3 | - |
| NTL5 | -60~+150 | - | - |
| LT | -100~+40 | 10-3 | - |
| SLT | -196~+40 (Non-condensing) |
10-3/10-5/10-7 | - |
| L*H* | customized | customized | customized |
Blank = Non-vacuum
V3 = Low pressure or vacuum to 10-3Pa
V5 = Vacuum to 10-5Pa
V7 = Vacuum to 10-7Pa
Blank = No radiation resistance
RH = Radiation resistance (total dose 106Gy)
*It is not possible to install both brake and position feedback devices on one single motor.
**Kingsni can provide signal converter to convert resolver signals to RS485 output or A/B incremental pulse output.
Technical Specifications
| model number | motor length (mm) |
current (RMS,A) |
resistance (Ω) |
inductance (mH) |
holding torque (N.m) |
rotor inertia (g.cm²) |
mass (Kg) |
motor wiring |
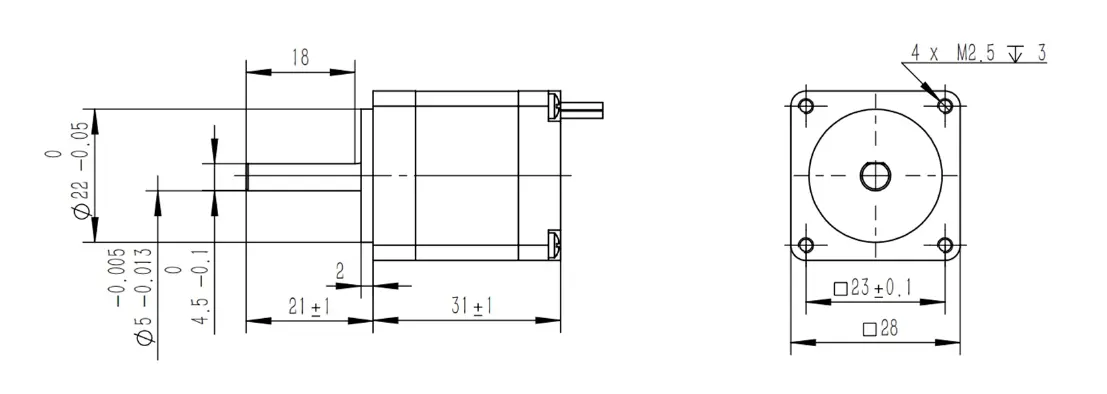
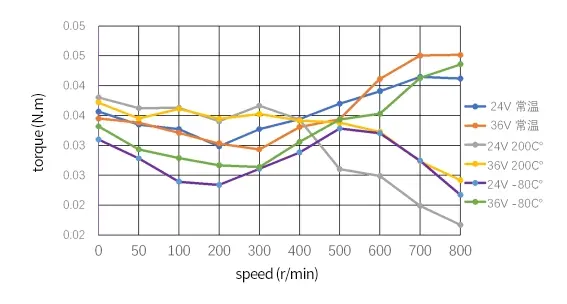
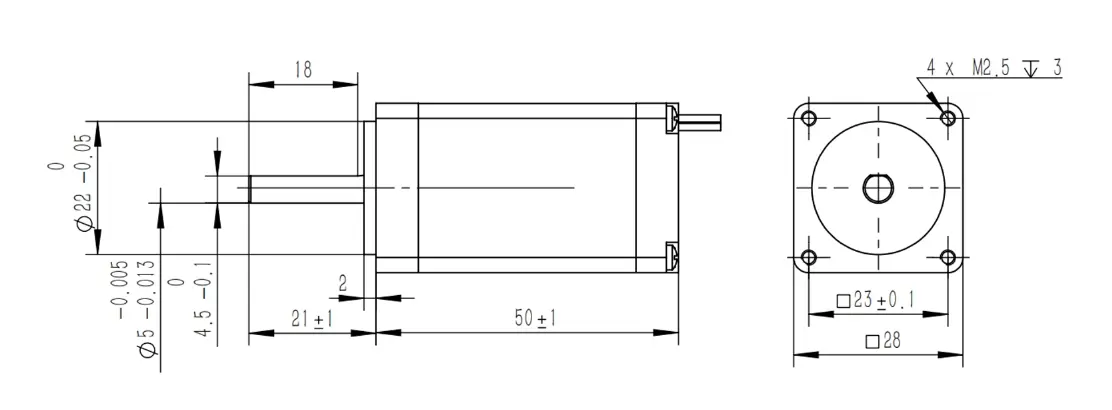
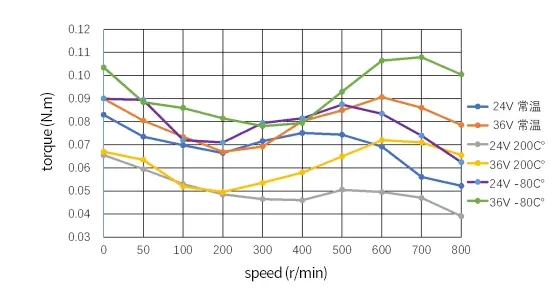
| KVM2832 | 32 | 0.4 | 4.6 | 3.41 | 0.04 | 8 | 0.15 | 4 flying leads |
Dimension Drawings
Torque-speed curve
Specifications
| model number | motor length (mm) |
current (RMS,A) |
resistance (Ω) |
inductance (mH) |
holding torque (N.m) |
rotor inertia (g.cm²) |
mass (Kg) |
motor wiring |
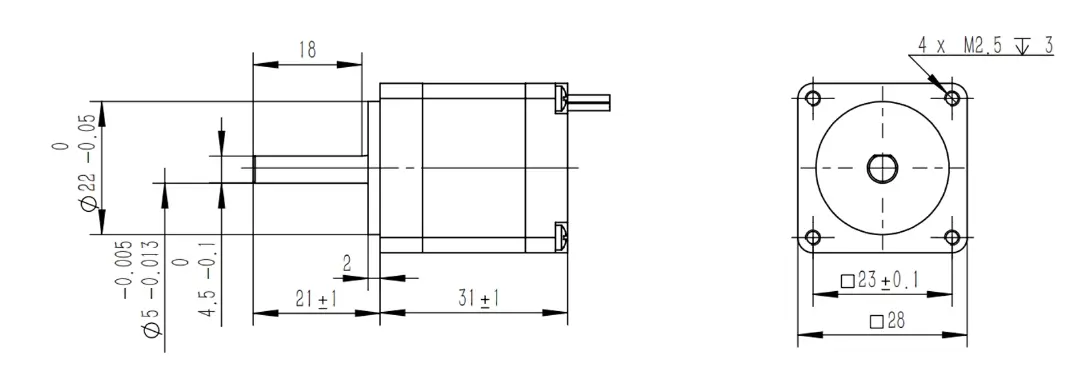
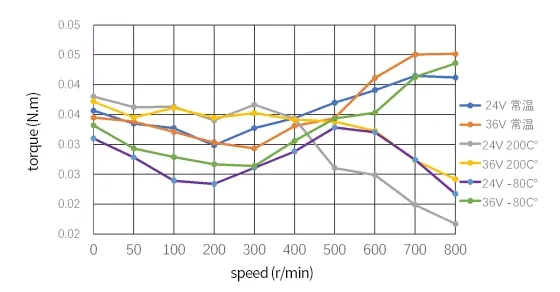
| KVM2851 | 51 | 0.5 | 7.49 | 7.62 | 0.10 | 19 | 0.24 | 4 flying leads |
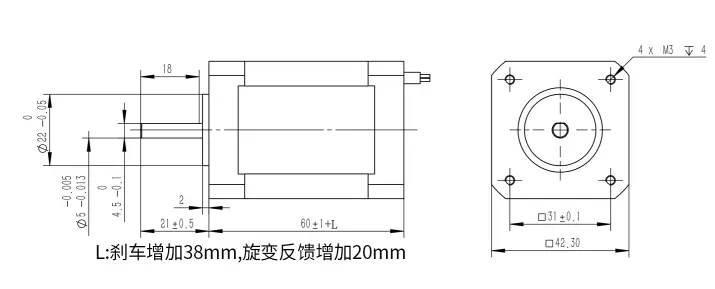
Dimension Drawings
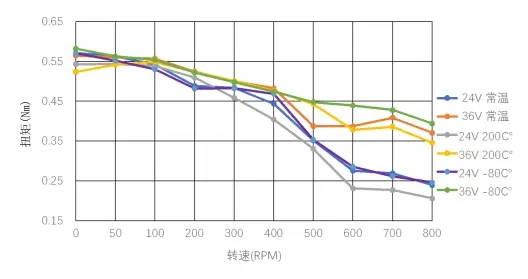
Torque-speed curve
Specifications
| model number | motor length (mm) |
current (RMS,A) |
resistance (Ω) |
inductance (mH) |
holding torque (N.m) |
rotor inertia (g.cm²) |
mass (Kg) |
cable diameter (mm) |
| KVM4248 | 48 | 1.1 | 1.84 | 3.05 | 0.40 | 76 | 0.51 | 4.5 |
Dimension Drawings
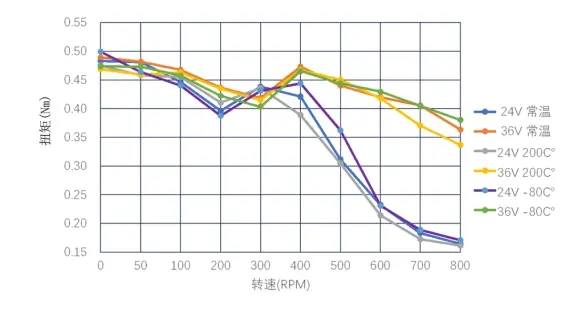
Torque-speed curve
Specifications
| model number | motor length (mm) |
current (RMS,A) |
resistance (Ω) |
inductance (mH) |
holding torque (N.m) |
rotor inertia (g.cm²) |
mass (Kg) |
cable diameter (mm) |
| KVM4260 non-vacuum environments | 60 | 1.4 | 2.31 | 4.45 | 0.58 | 108 | 0.63 | 4.5 |
| KVM4260 vacuum environments | 60 | 1.1 | 2.31 | 4.45 | 0.5 | 108 | 0.63 | 4.5 |
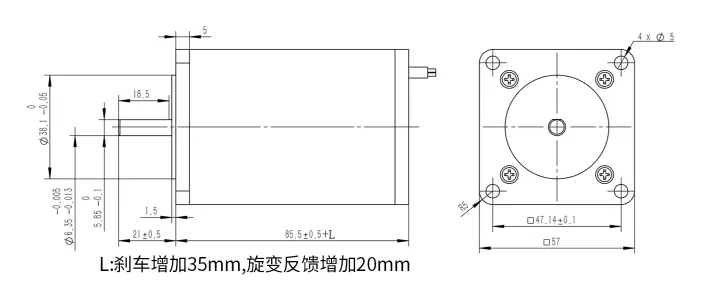
Dimension Drawings
Please contact us for dimension drawings of rear shaft, screw output shaft and handwheel options.
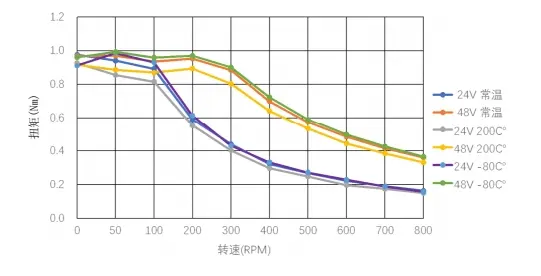
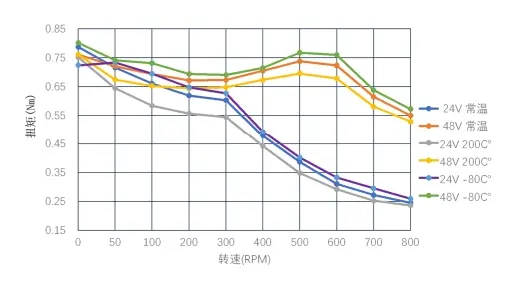
Torque-speed curve
Specifications
| model number | motor length (mm) |
current (RMS,A) |
resistance (Ω) |
inductance (mH) |
holding torque (N.m) |
rotor inertia (g.cm²) |
mass (Kg) |
cable diameter (mm) |
| KVM5770 non-vacuum environments | 70 | 2.7 | 1.15 | 3.32 | 0.97 | 180 | 1.05 | 4.5 |
| KVM5770 vacuum environments | 70 | 1.9 | 1.15 | 3.32 | 0.8 | 180 | 1.05 | 4.5 |
Dimension Drawings

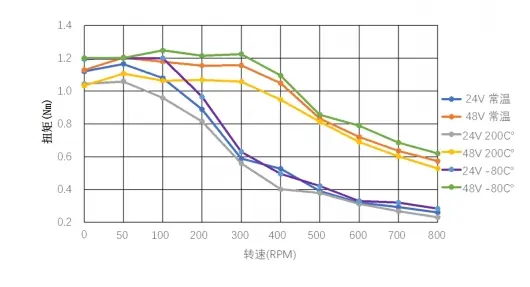
Torque-speed curve
Specifications
| model number | motor length (mm) |
current (RMS,A) |
resistance (Ω) |
inductance (mH) |
holding torque (N.m) |
rotor inertia (g.cm²) |
mass (Kg) |
cable diameter (mm) |
| KVM5786 non-vacuum environments | 86 | 2.7 | 1.43 | 4.05 | 1.2 | 228 | 1.28 | 4.5 |
| KVM5786 vacuum environments | 86 | 1.9 | 1.43 | 4.05 | 0.96 | 228 | 1.28 | 4.5 |
Dimension Drawings
Please contact us for dimension drawings of rear shaft, screw output shaft and handwheel options.
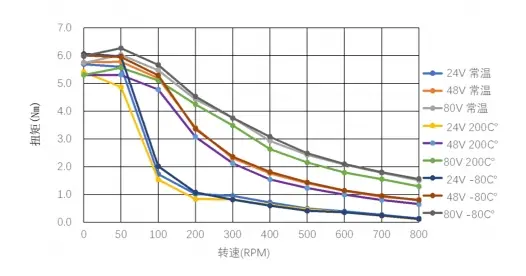
Torque-speed curve
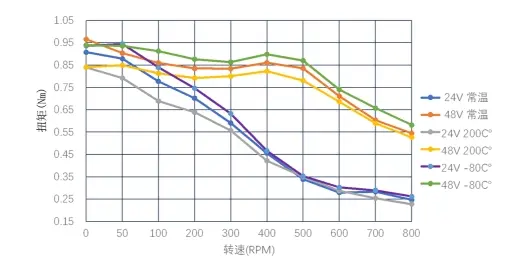
Specifications
| model number | motor length (mm) |
current (RMS,A) |
resistance (Ω) |
inductance (mH) |
holding torque (N.m) |
rotor inertia (g.cm²) |
mass (Kg) |
cable diameter (mm) |
| KVM86128 non-vacuum environments | 128 | 6.0 | 0.99 | 5.18 | 6 | 2700 | 4.7 | 5.0 |
| KVM86128 vacuum environments | 128 | 4.28 | 0.73 | 2.97 | 4.4 | 2700 | 4.7 | 5.0 |
Dimension Drawings
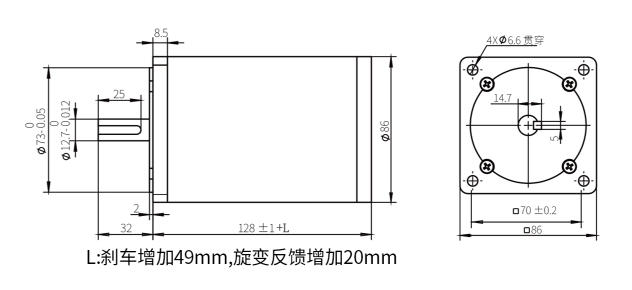
Please contact us for dimension drawings of rear shaft, screw output shaft and handwheel options.
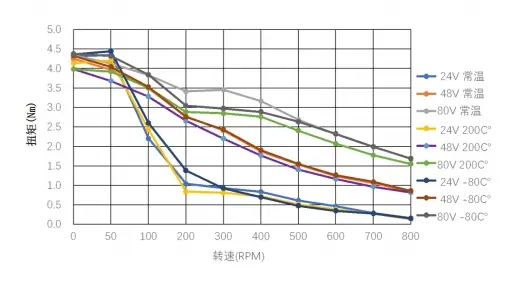
Torque-speed curve