






Troubleshooting Methods for Vacuum Servo Motor Interference
Problem Description
After power-on, the servo motor fails to operate normally, exhibiting抖动 (jitter) or runaway (flying) behavior.
Keywords
Vacuum; servo motor; runaway; jitter; failure to operate
Cause Analysis
- Incorrect wiring sequence or loose connection in the encoder cable or power cable; improper grounding of the motor shield and ground wire not following standard practices.
- Improper PID gain settings for the motor.
- Encoder cable is too long, and twisted-pair shielded cable is not used.
- Presence of interference sources on site. After Servo drives are affected by power supply harmonics, frequent false alarms are common—such as intermittent reports of overheating, overcurrent, or overvoltage faults.
Solutions
- Check the wiring sequence to ensure no misconnections, missing connections, or phase loss. Follow proper wiring methods. Use a multimeter in ohms mode to test the power cable: measure the three wires (red, white, black) in pairs to check for normal resistance. Verify whether the green wire is shorted to the red, white, or black wires or to ground. The green wire (PE) must be connected to the drive's PE terminal. Use a multimeter to measure the resistance values of the three encoder wire pairs: green/white, red/black, and yellow/blue. Check for broken wires or incorrect connections. Signal cables (encoder lines) should be routed away from high-power lines such as UVW motor cables. Separate high- and low-voltage wiring—do not bundle them together or place them in the same cable tray.
- Manually rotate the motor shaft to assess the rigidity. If the rigidity is too high, reduce the motor gain accordingly; if too low, increase the motor gain based on actual conditions. When working with vacuum high-low temperature servo motors, high-temperature vacuum servo motors, or low-temperature vacuum servo motors, proper gain adjustment is especially critical due to the extreme operating environments.

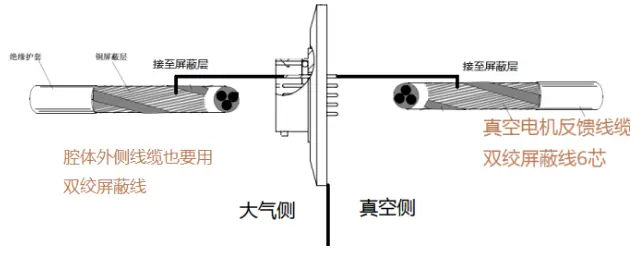
- Motor feedback must use twisted-pair shielded cable (see figure above). The shield must be connected correctly. This is particularly important for vacuum applications: when passing through a chamber feedthrough, the shielding layer must occupy its own pin on the vacuum connector and should not be directly terminated to the chamber housing. For deep cryogenic vacuum servo motors, ultra-high-temperature vacuum servo motors, or ultra-high vacuum (UHV) servo motors, maintaining proper shielding integrity is essential to ensure reliable feedback signal transmission under extreme conditions.
- Identify interference sources—such as sensors, host computers, instruments, meters, or low-voltage electrical devices sharing the same power supply as the servo system. Interference may manifest as erratic operation, such as sensors failing to detect correct physical values, inaccurate measurements, intermittent or lost communication, or metering devices (e.g., power meters, ammeters, voltmeters) providing incorrect readings (too high or too low). Implement shielding measures by using electromagnetic EMI filters, adding interference suppression resistors on control lines, or installing ferrite cores on motor power cables to prevent interference from the power lines affecting the encoder lines. For motors equipped with brakes, the brake power supply should be powered by a separate switching power supply; avoid sharing the power supply with other components to minimize interference.
When working with specialized motors such as cleanroom vacuum servo motors, high vacuum precision servo motors, low outgassing vacuum servo motors, semiconductor cleanroom servo motors, extreme temperature resistant servo motors, Class 1000 cleanroom vacuum servo motors, Class 100 cleanroom vacuum servo motors, oil-free vacuum servo motors, or particle contamination prevention vacuum servo motors, attention to proper filtering and shielding is critical to maintain performance in sensitive or high-purity environments.