步進驅動器

















步進驅動器 YKE2204M
主要特點
●32 位元 DSP 控制,穩定性好,抗振性能優異
●4 檔恆定扭力微步設置,最多 32 檔微步
● 電流控制平穩精準,有效降低馬達發熱
●最高脈衝響應頻率為 100kHz
● 低速低頻微步進的極佳平滑度
● 光隔離差分訊號輸入,抗干擾能力強
● 驅動電流可調至低於 2.2A
●電壓輸入範圍:直流18~36V
● 具有過壓、欠壓等故障保護功能
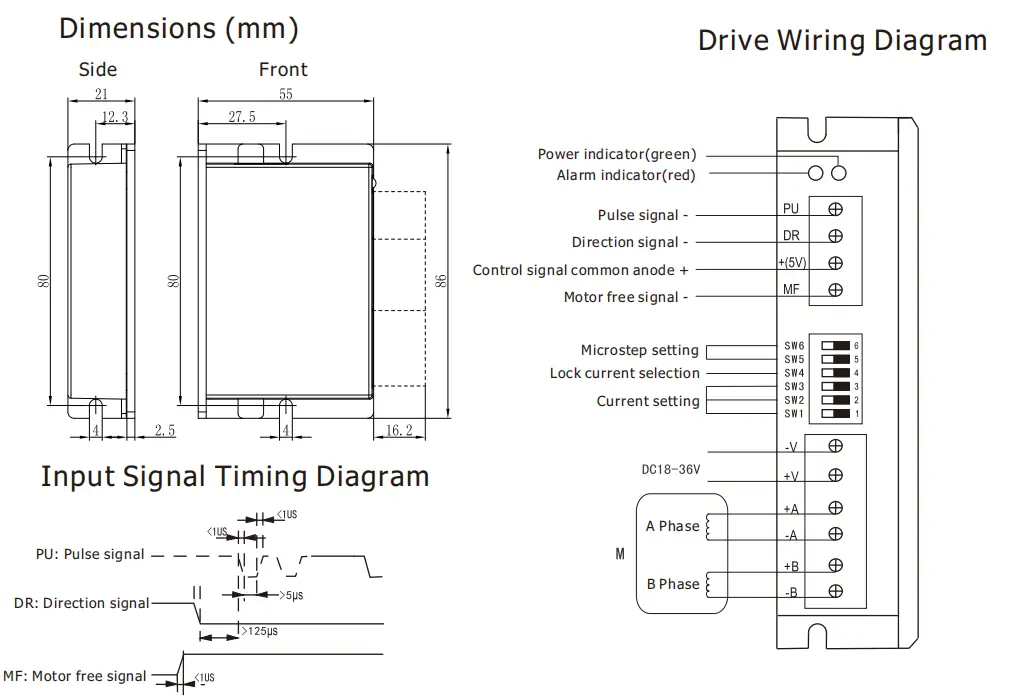
● 尺寸小巧,體積 86*55*21 (mm³),重量 0.12kg
● 適用於 42mm(NEMA17)兩相開環步進電機

① 產品系列
KH系列步進電機
② 法蘭尺寸
28/42/57/86毫米
③ 馬達長度
48/51/56/58/60/65/76/80/84/118/156/165/201毫米
④ 輸出軸
D = 單軸
SZ = 雙軸
空白 = 無煞車
B = 附煞車
空白 = 無回饋
**IE = 增量編碼器
*** AE = 絕對式編碼器(RS485、Modbus RTU)
⑦ 整合式驅動器安裝
空白 = 不包含整合式步進驅動器
DRC = 安裝在馬達側面的步進驅動器
DRH = 安裝在馬達後端的步進驅動器
*不可能在一台馬達上同時安裝煞車裝置和位置回授裝置。
**為了使增量編碼器訊號能夠被閉迴路步進驅動器接收和處理,編碼器輸出訊號必須是 5V 差分訊號,最大解析度為 2500PPR。
*** 絕對編碼器回授訊號需要由使用者的控制器接收和處理。
YKE2204M 微步設置
| 微步 | 1 | 8 | 16 | 32 |
| PU/修訂版 | 預設值(200) | 1600 | 3200 | 6400 |
| SW6 | 在 | 在 | 離開 | 離開 |
| SW5 | 在 | 離開 | 在 | 離開 |
SW4:關閉=半電流,開啟=全電流
YKE2204M 目前設置
| 目前均方根值 | 預設值(0.2) | 0.4 | 0.5 | 0.7 | 0.9 | 1.1 | 1.4 | 1.6 |
| 目前峰值 | 預設值(0.3) | 0.5 | 0.7 | 1.0 | 1.3 | 1.6 | 1.9 | 2.2 |
| SW3 | 在 | 在 | 在 | 在 | 離開 | 離開 | 離開 | 離開 |
| SW2 | 在 | 在 | 離開 | 離開 | 在 | 在 | 離開 | 離開 |
| SW1 | 在 | 離開 | 在 | 離開 | 在 | 離開 | 在 | 離開 |
終端介紹
| 象徵 | 功能 | 規格 |
| 電力 | 電源指示燈 | 通電後,綠色指示燈亮起。 |
| 警報 | 故障指示器 | 當出現過電流、欠壓或過壓時,紅色指示燈會亮起。 |
| 可以 | 脈衝訊號 光電隔離 - | 下降沿效應:當脈衝由高電平變為低電平時,馬達移動一步。內建輸入電阻 384Ω,要求:低電平 0-0.5V,高電平與共陽極相同,脈衝寬度 >5μs。 |
| 博士 | 方向訊號 光電隔離 - | 用於改變馬達方向。內建輸入電阻 384Ω,要求:低電位 0-0.5V,高電位與共陽極相同,脈衝寬度 >5μs。 |
| +(5V) | 控制訊號 共陽極 + | 驅動電壓範圍為3.3V-24V,電壓>5V時必須加裝限流電阻。電壓為24V時需接2KΩ電阻,電壓為12V時需接820Ω電阻。 |
| MF | 馬達自由訊號 光隔離 - | 當有效(低電平)時,馬達線圈電流被切斷, 電機自由。內建輸入電阻 384Ω,要求:低電位 0- 0.5V,高電位與共陽極相同,脈衝寬度 >5μs。 |
| -V | 電源 - | DC18-36V,直流輸入,電源功率>100W |
| +V | 電源+ | |
| +A,-A | 馬達連接 |  |
| +B,-B |
方面