

















KVM series stepper motors for extreme environmental conditions of vacuum, cryogenic , high-temperature and radiation
Vacuum · Cryogenic · High-temperature · Radiation
Key Features
● Vacuum: up to 10-7Pa
● Operating temperature: down to -196℃ , up to 200℃
● Radiation resistance: up to 106Gy
● Motor Flange: 28/42/57/86mm ( Nema 11/17/23/34)
● Holding torque: 0.04 to 4.4Nm
● Basic step angle: 1.8° with accuracy of 5%
● Lubrication: grease or dry lubrication
● Optional: resolver feedback, safe brake, double shaft, modified shaft
Options
Applications

KVM series stepper motors
28/42/57/86mm
32/51/48/60/70/86/128mm
D = single shaft
SZ = double shaft
Blank = without brake
B = with brake
Blank = without feedback
**R = with resolver feedback
| Environmental temperature rating code | Temperature range (℃) |
Vacuum class |
Radiation resistance (Gy,optional) |
| RHT | -20~+200 | 10-3 | 106 |
| SHT | -20~+200 | 10-3/10-5/10-7 | - |
| HT | -20~+150 | 10-3/10-5/10-7 | - |
| NTL1 | -40~+85 | 10-1 | - |
| NTL2 | -60~+120 | 10-3/10-5 | - |
| NTL3 | -65~+125 | 10-3 | - |
| NTL4 | -80~+40 | 10-3 | - |
| NTL5 | -60~+150 | - | - |
| LT | -100~+40 | 10-3 | - |
| SLT | -196~+40 (Non-condensing) |
10-3/10-5/10-7 | - |
| L*H* | customized | customized | customized |
Blank = Non-vacuum
V3 = Low pressure or vacuum to 10-3Pa
V5 = Vacuum to 10-5Pa
V7 = Vacuum to 10-7Pa
Blank = No radiation resistance
RH = Radiation resistance (total dose 106Gy)
*It is not possible to install both brake and position feedback devices on one single motor.
**Kingsni can provide signal converter to convert resolver signals to RS485 output or A/B incremental pulse output.
Technical Specifications
| model number | motor length (mm) |
current (RMS,A) |
resistance (Ω) |
inductance (mH) |
holding torque (N.m) |
rotor inertia (g.cm²) |
mass (Kg) |
motor wiring |
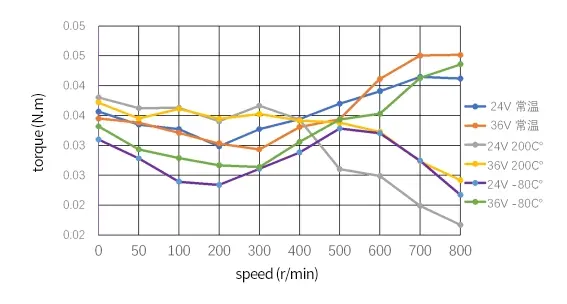
| KVM2832 | 32 | 0.4 | 4.6 | 3.41 | 0.04 | 8 | 0.15 | 4 flying leads |
Dimension Drawings

Torque-speed curve
Specifications
| model number | motor length (mm) |
current (RMS,A) |
resistance (Ω) |
inductance (mH) |
holding torque (N.m) |
rotor inertia (g.cm²) |
mass (Kg) |
motor wiring |
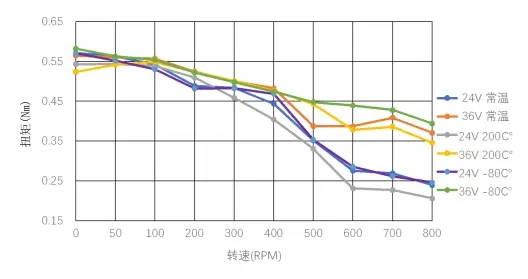
| KVM2851 | 51 | 0.5 | 7.49 | 7.62 | 0.10 | 19 | 0.24 | 4 flying leads |
Dimension Drawings

Torque-speed curve

Specifications
| model number | motor length (mm) |
current (RMS,A) |
resistance (Ω) |
inductance (mH) |
holding torque (N.m) |
rotor inertia (g.cm²) |
mass (Kg) |
cable diameter (mm) |
| KVM4248 | 48 | 1.1 | 1.84 | 3.05 | 0.40 | 76 | 0.51 | 4.5 |
Dimension Drawings

Torque-speed curve

Specifications
| model number | motor length (mm) |
current (RMS,A) |
resistance (Ω) |
inductance (mH) |
holding torque (N.m) |
rotor inertia (g.cm²) |
mass (Kg) |
cable diameter (mm) |
| KVM4260 non-vacuum environments | 60 | 1.4 | 2.31 | 4.45 | 0.58 | 108 | 0.63 | 4.5 |
| KVM4260 vacuum environments | 60 | 1.1 | 2.31 | 4.45 | 0.5 | 108 | 0.63 | 4.5 |
Dimension Drawings

Please contact us for dimension drawings of rear shaft, screw output shaft and handwheel options.
Torque-speed curve

Specifications
| model number | motor length (mm) |
current (RMS,A) |
resistance (Ω) |
inductance (mH) |
holding torque (N.m) |
rotor inertia (g.cm²) |
mass (Kg) |
cable diameter (mm) |
| KVM5770 non-vacuum environments | 70 | 2.7 | 1.15 | 3.32 | 0.97 | 180 | 1.05 | 4.5 |
| KVM5770 vacuum environments | 70 | 1.9 | 1.15 | 3.32 | 0.8 | 180 | 1.05 | 4.5 |
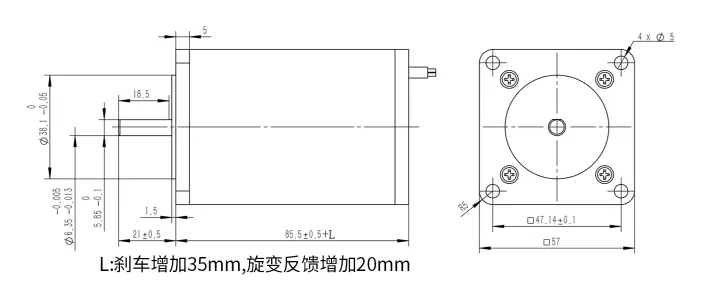
Dimension Drawings

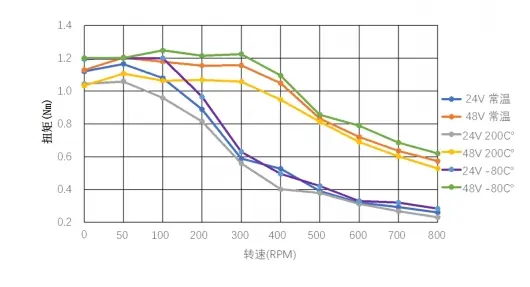
Torque-speed curve


Specifications
| model number | motor length (mm) |
current (RMS,A) |
resistance (Ω) |
inductance (mH) |
holding torque (N.m) |
rotor inertia (g.cm²) |
mass (Kg) |
cable diameter (mm) |
| KVM5786 non-vacuum environments | 86 | 2.7 | 1.43 | 4.05 | 1.2 | 228 | 1.28 | 4.5 |
| KVM5786 vacuum environments | 86 | 1.9 | 1.43 | 4.05 | 0.96 | 228 | 1.28 | 4.5 |
Dimension Drawings
Please contact us for dimension drawings of rear shaft, screw output shaft and handwheel options.
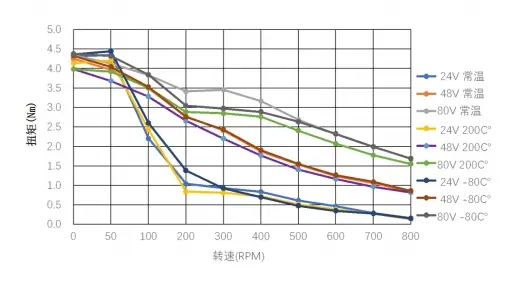
Torque-speed curve

Specifications
| model number | motor length (mm) |
current (RMS,A) |
resistance (Ω) |
inductance (mH) |
holding torque (N.m) |
rotor inertia (g.cm²) |
mass (Kg) |
cable diameter (mm) |
| KVM86128 non-vacuum environments | 128 | 6.0 | 0.99 | 5.18 | 6 | 2700 | 4.7 | 5.0 |
| KVM86128 vacuum environments | 128 | 4.28 | 0.73 | 2.97 | 4.4 | 2700 | 4.7 | 5.0 |
Dimension Drawings

Please contact us for dimension drawings of rear shaft, screw output shaft and handwheel options.
Torque-speed curve