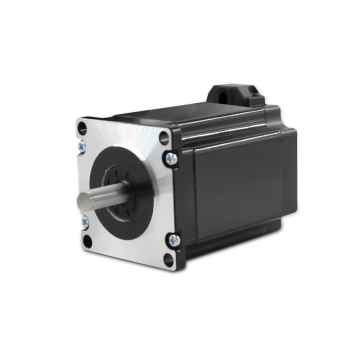

















KH series stepper motors for extreme environmental conditions of cryogenic , high-temperature
Vacuum · Cryogenic · High-temperature · Radiation
Key Features
● Operating temperature: down to -45℃ , up to 100℃
● Motor flange: 28/42mm(Nema 11/17)
● Holding torque: 0.1/0.5Nm
● Optional: feedback device, safe brake, modified shaft, integrated drives
Options
Applications

KH series stepper motors
28/42/57/86mm
48/51/56/58/60/65/76/80/84/118/156/165/201mm
D = single shaft
SZ = double shaft
Blank = without brake
B = with brake
Blank = without feedback
**IE = Incremental encoder
*** AE = Absolute encoder(RS485, Modbus RTU)
Blank = Without integrated mounted stepper drive
DRC = stepper driver mounted on the side of the motor
DRH = stepper driver mounted at the rear end of the motor
*It is not possible to install both brake and position feedback devices on one single motor.
**In order for the incremental encoder signal to be received and processed by the closed-loop stepper drive, the encoder output signals must be 5V differential signals with a maximum resolution of 2500PPR.
*** The absolute encoder feedback signals need to be received and processed by the user′s controller.
Technical Specifications
| model number | motor length (mm) |
current (RMS,A) |
resistance (Ω) |
inductance (mH) |
holding torque (N.m) |
rotor inertia (g.cm²) |
mass (Kg) |
cable diameter (mm, Including shield) |
IP grade |
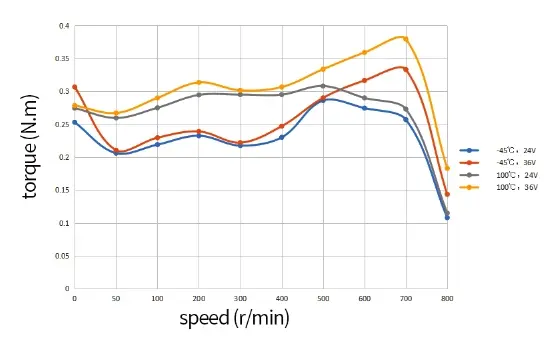
| KH2851 | 51 | 0.8 | 8.55 | 2.10 | 0.1 | 18 | 0.2 | - | IP65 |
Dimension Drawings

Torque-speed curve

Specifications
| model number | motor length (mm) |
current (RMS,A) |
resistance (Ω) |
inductance (mH) |
holding torque (N.m) |
rotor inertia (g.cm²) |
mass (Kg) |
cable diameter (mm, Including shield) |
IP grade |
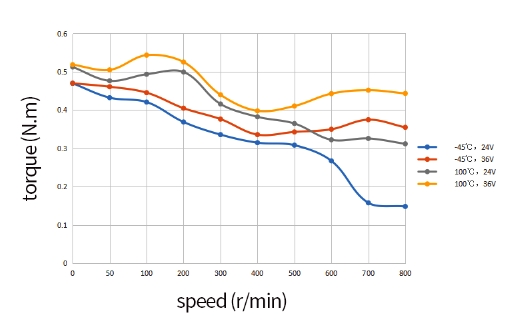
| KH4248 | 48 | 1.3 | 2.05 | 2.65 | 0.35 | 68 | 0.4 | 4.5 | IP65 |
| KH4260 | 60 | 1.3 | 3.15 | 4.65 | 0.5 | 102 | 0.5 | 4.5 | IP65 |
Dimension Drawings


Torque-speed curve
Specifications
| model number | motor length (mm) |
current (RMS,A) |
resistance (Ω) |
inductance (mH) |
holding torque (N.m) |
rotor inertia (g.cm²) |
mass (Kg) |
cable diameter (mm, Including shield) |
IP grade |
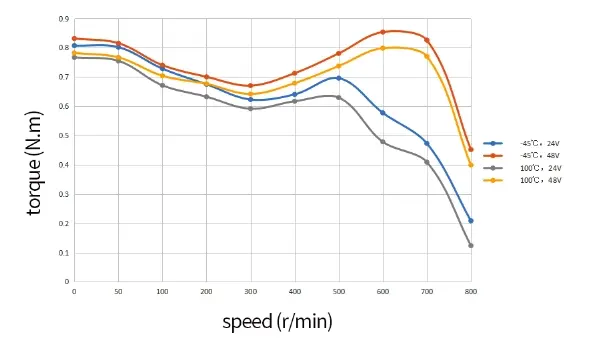
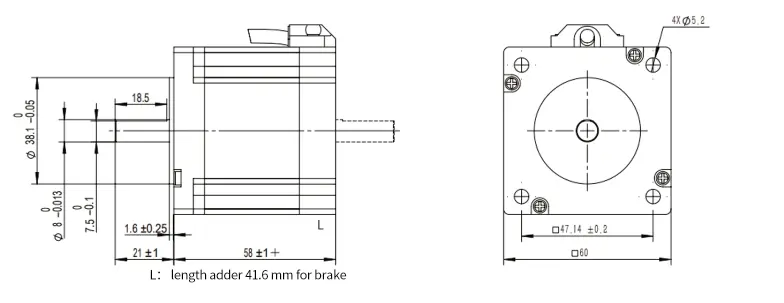
| KH5756 | 56 | 3.0 | 0.58 | 1.00 | 0.8 | 300 | 0.7 | 5.0 | IP65 |
| KH5776 | 76 | 3.0 | 0.75 | 1.62 | 1.4 | 480 | 1.0 | 5.0 | IP65 |
Dimension Drawings


Torque-speed curve

Specifications
| model number | motor length (mm) |
current (RMS,A) |
resistance (Ω) |
inductance (mH) |
holding torque (N.m) |
rotor inertia (g.cm²) |
mass (Kg) |
cable diameter (mm, Including shield) |
IP grade |
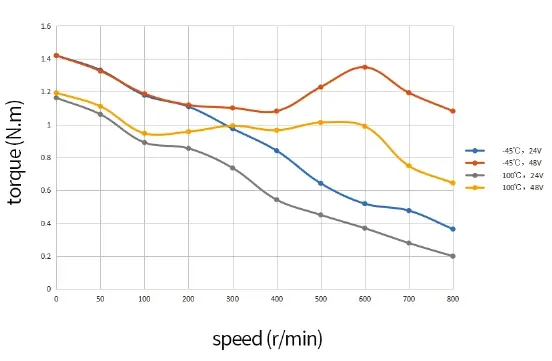
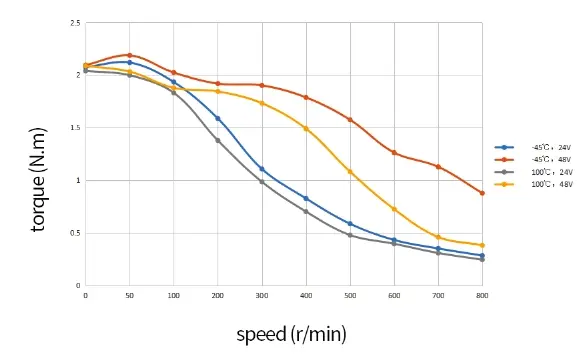
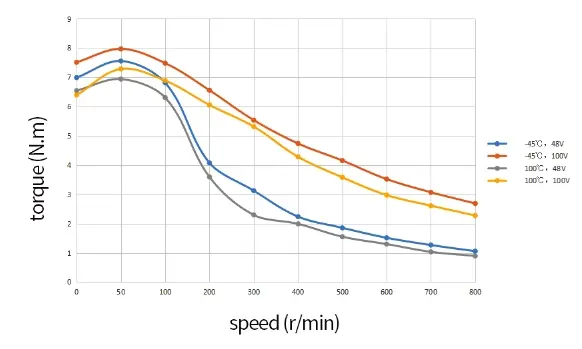
| KH6058 | 58 | 3.0 | 0.76 | 1.66 | 1.1 | 300 | 0.8 | 5.0 | IP65 |
| KH6065 | 65 | 3.0 | 0.87 | 1.97 | 1.40 | 570 | 1.0 | 5.0 | IP65 |
| KH6084 | 84 | 3.5 | 1.15 | 2.85 | 2.2 | 840 | 1.3 | 5.0 | IP65 |
Dimension Drawings


Torque-speed curve

Specifications
| model number | motor length (mm) |
current (RMS,A) |
resistance (Ω) |
inductance (mH) |
holding torque (N.m) |
rotor inertia (g.cm²) |
mass (Kg) |
cable diameter (mm, Including shield) |
IP grade |
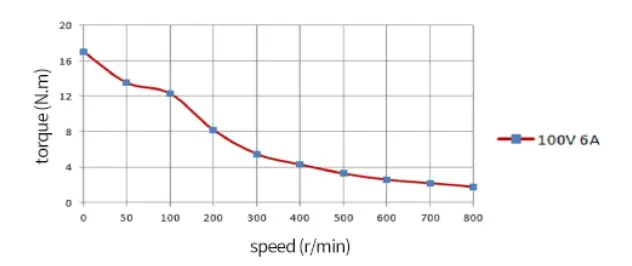
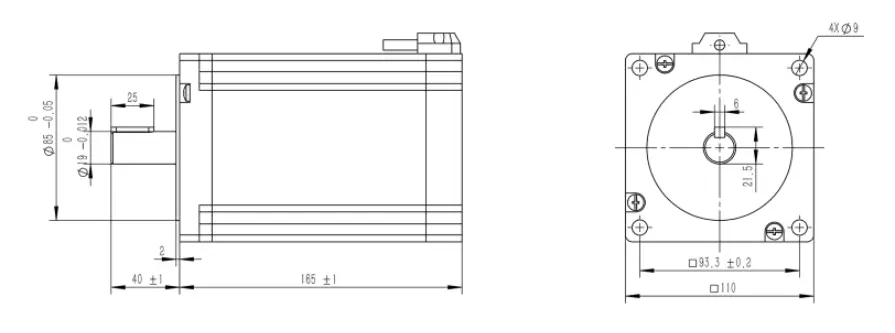
| KH8680 | 80 | 4.4 | 0.46 | 2.56 | 2.8 | 1400 | 2.3 | 6.0 | IP65 |
| KH86118 | 118 | 6.0 | 0.73 | 6.05 | 7.5 | 2700 | 3.9 | 6.0 | IP65 |
| KH86156 | 156 | 6.0 | 0.71 | 8.24 | 10.0 | 4000 | 5.5 | 6.0 | IP65 |
Dimension Drawings



Torque-speed curve
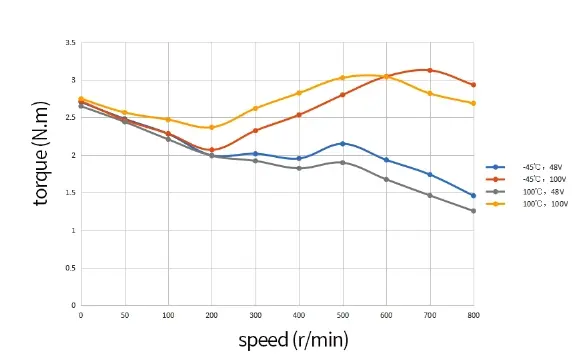
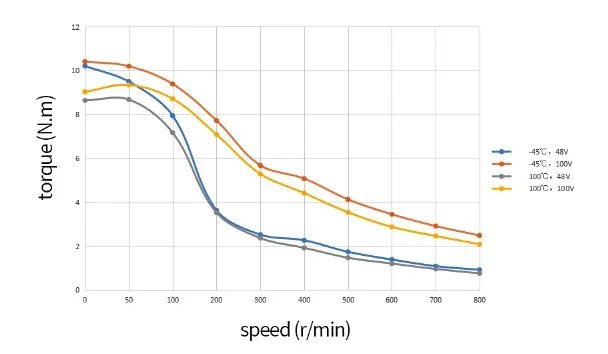
Specifications
| model number | motor length (mm) |
current (RMS,A) |
resistance (Ω) |
inductance (mH) |
holding torque (N.m) |
rotor inertia (g.cm²) |
mass (Kg) |
cable diameter (mm, Including shield) |
IP grade |
| KH110165 | 165 | 6.0 | 0.90 | 20 | 17 | 13000 | 9.6 | 6.0 | IP65 |
| KH110201 | 201 | 6.0 | 1.095 | 23.19 | 21 | 16200 | 11.9 | 6.0 | IP65 |
Dimension Drawings

Torque-speed curve